














��ICP��112451047180��-6
���ڵ�Ƭ��������ɨ�ػ����˿���ϵͳ���
ժ Ҫ
����ɨ�ػ�����һֱ���ʿ�ѧ�о�����Ҫ����ɨ�ػ����˿�����Ч�ļ������ǵ��Ͷ�ʱ�䣬ͨ���Աȷ������ĶԻ����˵���ƽ����˼�㻯��������������ơ��ͳɱ����ŵ㣬�������Ʒ���ѡ����ʱ�±Ƚ����ŵ�STM32F103ZEϵ��оƬ���Ժ��ڵĸĽ����Ż����пɲ����ռ䣬�������˺����紫����������ʽѹ����������HC-05������������Χ�豸��
���Ķ�ɨ�ػ����˴Ӹ�ģ�����ѡ���ٵ����巽����ƣ����������˼·���Ի���������Ӳ���Ĺ��ܺ�ģ��Ĺ���ԭ����������ϸ�ķ�����������������ʵ��ģ����ԣ��û����˵ĵ�·�ṹ��Ƽ����Է��㡣����ʵ�������ж������������ɨ���ϰ���Ĺ�ܶ��ܾ�����ģ���������״̬���ã�֤�������˵���Ʒ�����ȷ�����С�
�ؼ��ʣ�ɨ�ػ����� ������ɨ ���� ��Ƭ��
Ŀ¼
��1�� ���� 1
1.1 ��Ʊ������о���ֵ 1
1.2 �������о���״ 1
��2�� ������� 3
2.1 ��Ƭ�������ѡ�� 3
2.2 ���ϴ�������ѡ�� 4
2.3 ѹ����������ѡ�� 4
2.4 ��ؼ���· 5
2.5 ����ģ����� 5
2.6 ��Դģ����� 6
2.7 ����·���滮���� 6
2.8 ����ģ����� 8
��3�� Ӳ����� 11
3.2 ��ؼ���·��� 12
3.3 ����ģ����� 13
3.4 ���м���·��� 14
3.5 ������ϴ��е�·��� 15
��4�� ������� 17
4.1 �������ģ�������� 17
4.2 ��ؼ�������� 18
4.3 ����ģ�������� 19
��5�� ϵͳ���� 20
�� �� 22
�� л 23
����� 24
��1�� ����
1.1 ��Ʊ������о���ֵ
��Ʊ��������ż�����ļ��ٷ�չ�����Ӳ�Ʒ���о���ø��ӹ㷺�����ǿ����ӷ��ӵ������н�ų��������˹����ܻ����˴����Ͷ��������˿��Խ�Լ�����˹��ɱ��������˿��Բ���ϵĽ��й����������˵Ĺ���Ч�ʱ��˹��Ͷ�Ч�ʸ��ߡ���ˣ�����ɨ�ػ����˾��б���Ƶ���Ҫ��ֵ��
�о���ֵ������ɨ�ػ�������һ�������˵��ӡ�������������������ͨѶ�����ȶ������ϵ��ۺ�ϵͳ�������˼���һֱ���ҹ������о���ǰ�أ�ɨ�ػ����˿���ͨ����ɨ��������ɶ����ڵ���࣬��Ч�ļ��������ǹ���֮�������ѹ���������������������������ƣ�ڹ������ϰ�����˵�Ǽ�ͥ�ر���Ʒ��
1.2 �������о���״
�����о���״��1997����ͼҵ繫˾������˹ǿ���Ƴ���һ������ɨ�ػ�������Ҷ�棬���Կ��Ƶײ�����ʹ���ж���ͬʱ��������������ij���������ʹ���ܹ�ȷ�ض���ϰ����Ҷ��������������з��ص�Դ����磬����Ҷ������ϴ��������ٶȽ�����Ч�ʵ��£�2004����ĩ���ǹ�˾�Ƴ���һ����ΪVC-RP30W�Ļ����״������ɨ�ػ����ˡ��䶨λ������Ҫ�ɽ�����άͼ��ʵ�֣�3D������ɨ�ػ����˸��ӵ������ԶԷ����ÿ�����ǽ��д�ɨ�������ϰ�����䵽���䣬������ײ������ɨ�ػ����˻��Զ�ת��ͬʱ���û�������ͨ����λ���鿴��װ�ڻ�����ǰ��������ͷ����Զ�̿��ƣ�������ʵ���˻����˵����ܻ���
�����о���״���ҹ�ɨ�ػ�������������һ������ģ�͵�ɨ�ػ����������������о�����TEK��˾����������ƣ�����ͨ����������������ƣ����Խ��оֲ���ɨ�������ɨ�������ﵽȫ��λ����ʽ��ɨ����ɨ����������з��س��վ��磬��ɨ�ػ����˴�Լ20���Ӹ����ʿ��Դﵽ95%��Ŀǰ����ɨ�ػ��������ڷ��ٷ�չ�У�����С����˹ʯͷ�Ƽ����ڶ˾����Ƴ��������ɨ�ػ����ˣ�����˹��2014���Ƴ��˵ر�DM81ɨ�ػ�����ģ�黯��Ʒ��ʯͷ�Ƽ���2016��������ɨ�ػ����ˡ�
1.3 ���Ҫ��
���ĵ������Ҫ�������¼������棺
1�����Ƶ�·����STM32��Ƭ������ϵͳ���ģ�����ɨ�ػ����˽���������ɨ�ͱ��ϵȹ��ܣ�ʵ�ֻ����˵�һ�����������ҵ��
2����ؼ�⣺���������������п���ͨ�����������ּ�IJ�ഫ�������������Ƿ��Ѿ���أ�����������
3�����ģ�飺ͨ�����������˹��磬��ϸ�������ʵ�ֻ�������ת������
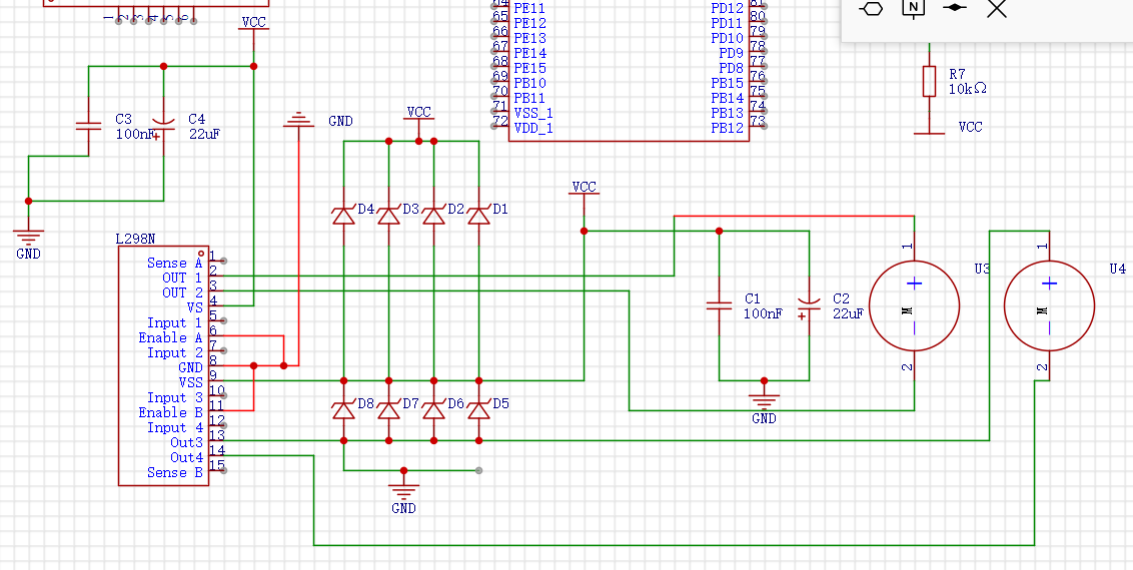
4��������������·��ͨ�������˵���ǰ�˵����������˫������ʵ�ֻ����˵�ǰ����ת��
5������ģ�飺��һ��USBתTTLģ��������ݲɼ��������������䣬ʵʱ���ٵ������˵Ĺ���״̬�͵�����ʾ��
6�������Ӧģ�飺ͨ��������ǰ�˵ĺ�������ͺ�����մ�����ʵ�ֺ�����ϣ����ٻ��������˹���ʱ��ĥ��
7�����м�⣺ͨ�������˶��ϵij����������м�⣬�����ֵ����Ԥ��ֵʱ���������ѻ�����ճ��С�
�����
[1]���棬�����⣬�ܵԺ�.����STM32��ʽ��������̬ϵͳ���ۺϲ���ƽ̨�����ʵ��[J].��е�������Զ�����2018.,47(03):173-176.
[2]���, �Ź�, ���ǿ. ����STM32������ɨ�ػ����˱���ϵͳ��Ƶ��о�[J]. �й�������, 2017(13):1.
[3]������, ����ɺ, ������,��. ����STM32�Ŀ���ϵͳӲ�����������[J]. ��е����, 2016, 54(7):3.
[4]���, ��˳, ����,��. ����STM32��Ƭ��������ɨ�ػ����˵����[J]. ��ѧ��Ƹ�, 2019, 000(025):338.
[5]�߱�.��������ɨ�ػ����˵Ĺؼ������о�[D].�����ѧ��2017.
[6]�ų���.���ڹ��Ե�����ɨ�ػ����˹ؼ������о���ʵ��[D].�ϲ���ѧ��2020.
[7]��ҫ. ���ڼ����״�������ƶ������˶�λ�����о�[D]. ����ʯ�ʹ�ѧ, 2019.
[8]������. ����ɨ�ػ����˿���ϵͳ���[J]. ��������, 2019(24):2.
[9]������, ���, ���,��. �Ĵ�ʽ�ƶ������˹켣���ٿ��Ƽ����о�[J]. �й����̻�еѧ��, 2018, 16(3):6.
[11]κ��.ɨ�ػ������Զ��س�ϵͳ�������ʵ��[D].�й���ѧ������ѧ,2018.
[12]ţ����.���ڸĽ���˫�ջ�����������ˢֱ������Ż������о�[D].̫ԭ������ѧ,2018.
[13]Wen Chaoting,zhang Jixian,Yao Hui,etc.Advances in renewable plant-derived protein source:THEstructure,physicochemicalpropertiesaffected by ultrasonication.[J].Ultrasonics sonochemistry,2018.