


苏ICP备112451047180号-6
机械手装置的PLC分析与控制设计
摘要
设计了基于PLC的气动机械手用于铝件拾取。该机械手使用5个气缸来完成推料、手臂伸缩、升降、旋转,吸盘吸合动作。给出了机械手总体结构和气动回路,进行了PLC的I/O地址分配,设计了相应的硬件与软件。将此机械手应用于铝件拾取,操作简单安全,降低了员工的流动率。可根据用户实际需求对各动作的位移、角度加以调整,适应实际工作现场。
关键词:PLC 气动 机械手
目录
第1章 机械手装置简介4
1.1、概述4
1.2、特点4
1.3、技术性能4
1.4、实训工作任务4
1.5、基本配置5
第2章 机械手装置组成、工作原理、控制要求及机构功能 6
2.1、系统要求 6
2.2、控制要求 6
2.3、机械手单元 7
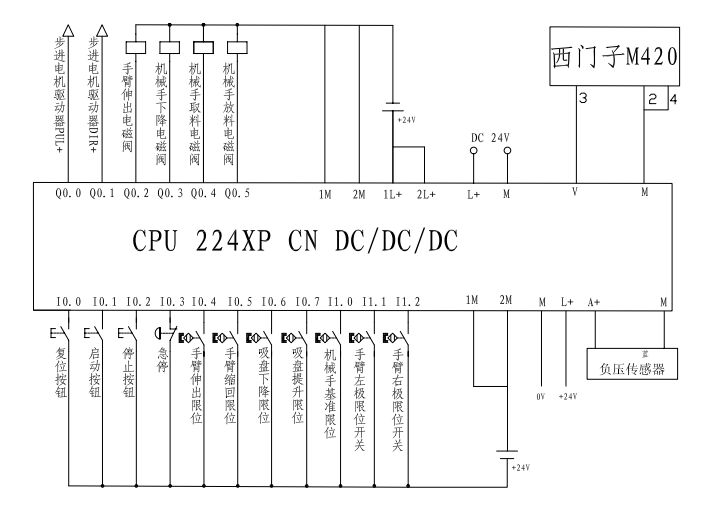
第3章 机械手装置电气、气动控制及运行操作 8
3.1、电气控制电路组成 8
3.2、气动原理及气动回路原理图 8
第4章 PLC设计 13
4.1、PLC的结构与工作原理 13
4.2、PLC控制系统的设计与故障诊断 15
第5章 成果16
结论
致谢
参考文献
1.1概述
本装置是一种典型的机电一体化,是为职业院校、职业教育培训机构而研制的,适合机电一体化、电气自动化等相关专业的教学和培训。它在接近工业生产制造现场基础上又针对教学及实训目的进行了专门设计,强化了机电一体化的安装与调试能力。本装置由导轨式型材实训台、机电一体化设备部件、电源模块、PLC模块、变频器模块、步进电机及驱动器模块、负压实训单元、模拟机械手单元和各种传感器等组成。采用开放式结构设计,可根据现有的机械部件组装设备,使整个装置能够灵活的按实训教学需要组装设备。装置采用工业标准结构设计及抽屉式模块放置架,组合方便。控制对象均采用典型机电设备部件。
本装置涵盖了机电一体化和电气自动化专业中所涉及的PLC控制、变频调速、步进调速、传感器检测、气动、机械结构安装与系统调试等内容。为培养可持续发展高技能人才提供一个良好的平台。
1.2特点
该实训考核装置的PLC模块I/O端子、变频器接线端子、交流电机接线端子、步进电机驱动器接线端子、各常用模块与PLC连接端子等,均采用安全插座连接,使用带安全插头的导线进行电路连接;各光电开关、限位开关、传感器和指示元件的电路,则通过端子排进行连接。插拔线连接电路与端子排连接电路相结合,既保证学生基本技能的训练、形成和巩固,又保证电路连接的快速、安全和可靠。
1.3技术性能
1.输入电源:三相四线(或三相五线)~380V±10% 50Hz
2.工作环境:温度-10℃~40℃ 相对湿度≤85%(25℃)海拔<4000m
3.装置容量:≤1.5kVA
4.外形尺寸:120cm×80cm×130cm
5.安全保护:具有漏电压、漏电流保护,安全符合国家标准
1.4设计工作任务
1.气动系统的安装与调试
通过配置的单杆气缸、双杆气缸指等气动执行元件和单控电磁换向阀、双控电磁换向阀和磁性开关等气动控制元件,可完成下列气动技术的工作任务;
单杆气缸动作回路的安装
气动方向控制回路的安装
气动速度控制的调试
气动顺序控制回路的安装
气动系统安装与调试
2.电气控制电路的安装
通过配置的步进电机、指令开关和传感器等,可完成下列电气安装的工作任务;
步进电机控制电路的连接
传感器检测电路的连接
3.PLC编程
步进电机控制程序编写
搬运机械手控制程序编写
4.控制系统安装与调试
通过配置的设备部件、PLC模块、变频器模块、步进电机模块、指令开关和传感器等,可完成下列自动控制系统安装与调试的工作任务:
搬运机械手的自动控制
负压自动控制
参考文献
[1] 田效伍. 电气控制与PLC应用技术[M]. 北京:机械工业出版社,2007.
[2] 韦瑞录,麦艳红. 可编程控制器原理及应用[M]. 广州:华南理工大学出版2007.
[3] 郁汉琪. 电气控制与可编程序控制器应用技术[M]. 南京:东南大学出版社,2003.
[4] 郭艳萍. 电气控制与PLC控制技术[M]. 北京:北京师范大学出版社,2007.
[5] 杨青洁. 三菱FX系列PLC应用系统设计指南[M]. 北京:机械工业出版社,2008.
[6] 高勤. 可编程控制器原理及应用(三菱机型)[M]. 北京:电子工业出版社,2006.