














苏ICP备112451047180号-6
基于单片机控制的微型四轴飞行器飞行控制系统设计
第1章 绪论
1.1 微型四轴的现状
四轴飞行器有很多种叫法,比如四旋翼飞行器、四旋翼直升机、四轴、四旋翼,这些都是四轴飞行器的别称或简称。四轴飞行器是一种多旋翼飞行器,由四个电机带动螺旋桨来控制飞行状态。四轴飞行器四个螺旋桨都是直接接在电机上的,螺旋桨通过十字形的布局让四轴飞行器通过改变电机转速致使飞机旋转,来达到调整自身姿态的作用。但是微型四轴飞行器不仅继承了传统四轴飞行器垂直升降,造价低,控制简单,它还有体积小,易携带,使用更加灵活、安全等传统四轴不具备的优势。在旅行拍摄、军事侦查、抓捕罪犯时的跟踪定位,灾后搜救等应用场景中,传统的四轴飞行器的缺点就明显展现出来了,由于其体积庞大,危险性高,噪声大,因而并不能实用于这些场景。但微型四轴飞行器却不同,小巧玲珑的身材让它在旅行或者军事任务中更加利于携带,还具备安全和不易被发现等优势。在追踪罪犯或者灾后搜救时,它还能自由穿梭于各种复杂狭隘的环境。目前业界对于微型四轴飞行器的价值挖掘并不完全,因此,对它的研究是很有意义的。
1.2 微型四轴的简介
微型四轴飞行器指的是机身的对角线小于15cm,由四个对称分布的电机组成的能够垂直升降,简单控制的飞行器。相较于普通四轴飞行器,它更加的安全,事故损害小,并且方便携带,扩宽了使用的场景。小巧的它更适合侦查和数据采集工作,而且成本低廉,硬件量产简单。在当前被广泛关注的无人机技术中,微型四轴飞行器更加亲和非专业人士,有着其他飞行器无法参与或比拟的使用场景和价值。
本文将从微型四轴飞行器的应用发展到其设计与实现进行阐述,并且通过利用空气动力学、自动控制理论、微电子技术、无线通信、传感器技术、惯性导航等技术,实现对微型四轴飞行器的姿态解算和飞行控制。
1.3 微型四轴开发环境
基础开发系统平台:我选择WINDOWS 10主要是因为是目前熟悉的大多数基础IDE开发环境均是建立在windows平台下的,能够提升研究的效率。
电路设计:我使用Altium Designer16来对飞行器机身和电路进行设计,该软件有着舒适的人机交互和强大的自定义布线规则、元器件库管理功能。使用它来进行飞行器电路设计是极佳的。
嵌入式软件:我最为熟悉的keil4,在该平台下进行了长时间编程,有较高熟练度,同时软件能满足代码的编译链接及其仿真等多种功能,使用它编写飞行系统的嵌入式软件部分对我来说具有比较高的效率。
目 录
第1章 绪论 3
1.1 微型四轴的现状 3
1.2 微型四轴的简介 3
1.3 微型四轴开发环境 3
第2章 系统硬件设计 5
2.1 主控电路的设计 6
2.2 姿态传感器电路设计 7
2.3 气压计电路设计 7
2.4 通讯模块的设计 8
2.5 供电方案设计 8
2.5.1 供电及电压测量电路 8
2.5.2 稳压电路 9
2.5.3 升压电路 10
2.6 电机驱动电路设计 10
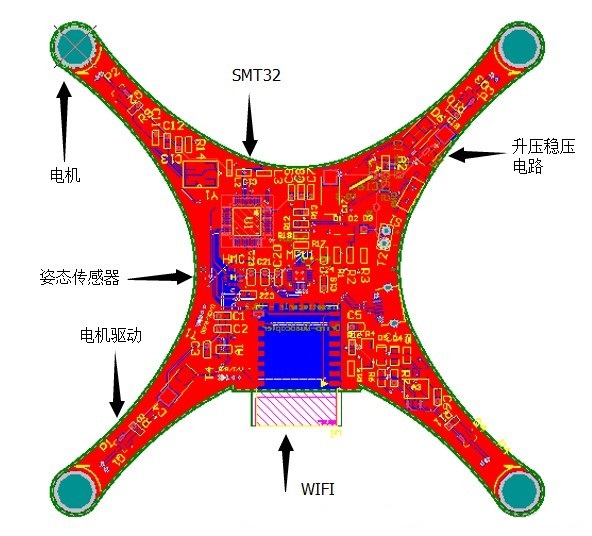
2.7 飞行器PCB板设计 11
2.7.1 飞行器PCB板设计 11
2.7.2 飞行器PCB板3D图 12
第3章 系统软件设计 14
3.1 系统控制原理 14
3.2 任务逻辑及流程图 15
3.3 飞行系统的PID控制 16
3.3.1 PID的原理及计算 16
3.3.2 串级PID 17
3.4 九轴姿态融合算法 17
第4章 实物制作 19
4.1 整理BOM表,购买元器件 19
4.2 打板及焊接 19
4.3 软件PID调试 20
4.4 遇到的问题及实物展示 21
总 结 22
致 谢 23
参考文献 24
附录1 电路总图 25
附录2 源程序 26
参考文献
[1] STM32F1XX系列处理器用户手册[EB].
[2] 杨明志.四旋翼飞行器自动驾驶仪设计[D].南京:南京航空航天大学,2008.
[3] 于卫卫.三自由度四旋翼盘旋系统控制问题研究[D].沈阳:东北大学,2007.
[4] 张家琪.四旋翼直升机姿态运动控制研究[D].沈阳:东北大学,2009.
[5] 庞庆霈.四旋翼飞行器设计与稳定控制研究[D].合肥:中国科学技术大学,2011.
[6] 周权,黄向华,朱理化.四旋翼微型飞行平台姿态稳定控制试验研究[J].传感器与微系统,2009,28(5):72-79.
[7] 聂博文,马宏绪,王剑.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[8] 李尧.四旋翼飞行器控制系统设计[D].大连:大连理工大学,2013.
[9] 谭浩强.C程序设计教程[M].北京:清华大学出版社,2010.
[10] 王璐.四旋翼无人飞行器控制技术研究[D].哈尔滨:哈尔滨工程大学,2012.
[11] 霍罡.可编程序控制器模拟量及PID算法应用案例[M].北京:高等教育出版社,2013.
[12] 宋佳佳.小型四旋翼飞行器实验平台设计[D].武汉:华中科技大学,2013.
[13] 程学功.四轴飞行器的设计与研究[D].杭州:杭州电子科技大学,2012.