



苏ICP备112451047180号-6
基于单片机的智能小车控制系统设计
摘要:本论文的主要任务是一个智能小车的设计。近年来,随着科学技术的迅速发展,单片机的应用正在不断地走向深入。同时带动传统控制检测,日新月益更新。在单片机应用系统在实时检测和自动控制往往作为一个核心部件。单片机是把主要的计算机部件集成在一块芯片上的微型计算机,它是一种微控制器,数量和各种接口集成。
本设计以单片机为核心,对光电传感器和超声波传感器的应用,三的功能,在汽车上的成功实施。红外传感器的接口电路,直流电机和电源的硬件选择,每个传感器的设计和生产,以及设计和电路的传感器安装的位置,和硬件完成。此外,测试和控制软件的编程和程序设计,硬件和软件的结合,最终完成,有望实现汽车的功能。
智能作为现代的新发明,是未来的发展方向,他可以按照预先设定的环境中,模型的自动运行,不需要人为的管理,科学研究等方面的应用,智能电动小车就是其中之一。
关键词:智能小车、传感器、单片机
Smart car controlled by single chip microcomputer
Abstract:The main task of this thesis is the design and implementation of an intelligent car. In recent years, with the rapid development of science and technology, SCM applications are continually deepening. At the same time promote the traditional control detection, crescent benefit update. In application system of single chip microcomputer in real-time detection and automatic control is often used as a core component. SCM is the main computer components integrated on a single chip micro computer, it is a kind of micro controller, the number and variety of interface integrated.
The design of a microcontroller as the core, the application of the photoelectric sensor and ultrasonic sensors, three, in the car on the successful implementation of. The interface circuit of the infrared sensor, DC motor and the power of the hardware, the design and production of each sensor, position sensor and circuit design and installation, and the hardware. In addition, programming and design of test and control software, hardware and software combination, finally completed, is expected to achieve the function of the car.
Smart as a modern invention, is the future direction of development, he can be in accordance with the pre-set environment model, automatic operation, without human management, scientific research and other fields of application, smart electric car is one of them.
Keywords:Smart car, sensor, single chip microcomputer
1.1引言 1
1.2 本课题的意义 1
1.3课题研究内容 2
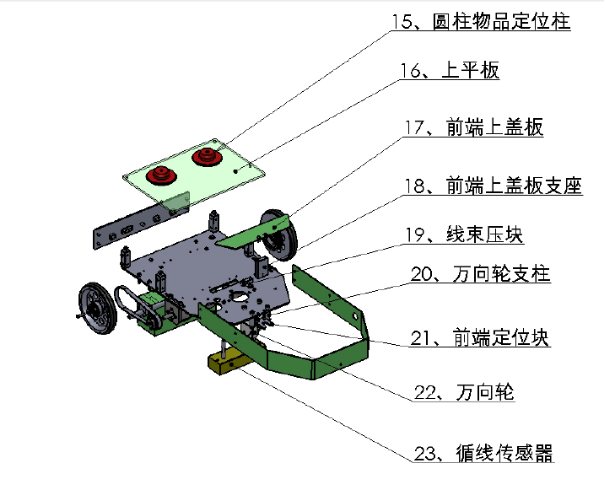
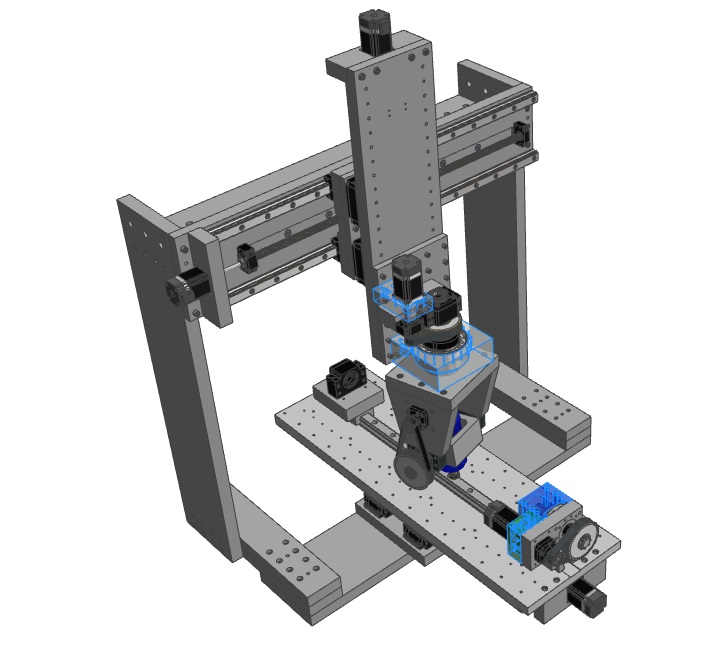
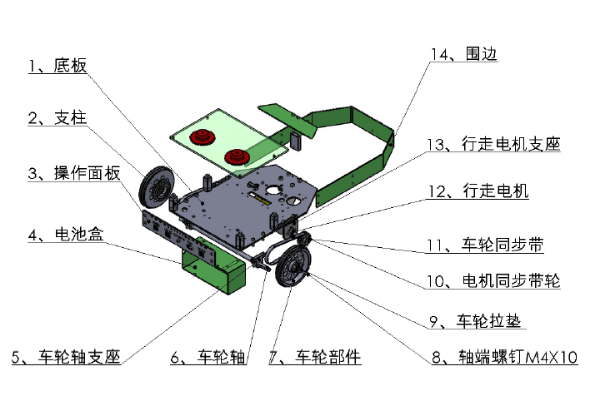
第二章 智能小车机械结构介绍 3
2.1 智能小车的组成 3
2.2 装配示意图 3
3.1 设计要求 7
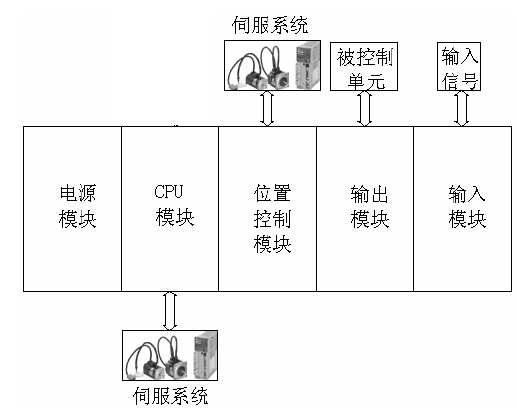
3.2 智能小车控制系统的构成方案 7
3.2.1 小车总体设计方案 7
3.2.2 基本模块设计方案 7
3.2.3 主控制电路 8
第四章 智能小车控制系统的硬件设计 10
4、1 控制系统组成 10
4、2 单片机的介绍以及选型 10
4.2.1 AT89S51介绍 11
4、3 单元硬件电路设计 14
4.3.1 单片机AT89S51核心模块 14
4.3.2 电源电路模块 16
4.3.3 光电寻迹模块 17
4.3.4 金属探测传感器模块 17
4.3.5 红外避障模块 18
4.3.6 按键控制模块设计 19
4.3.7 LCD显示电路 19
4.4 步进电机驱动设计电路 20
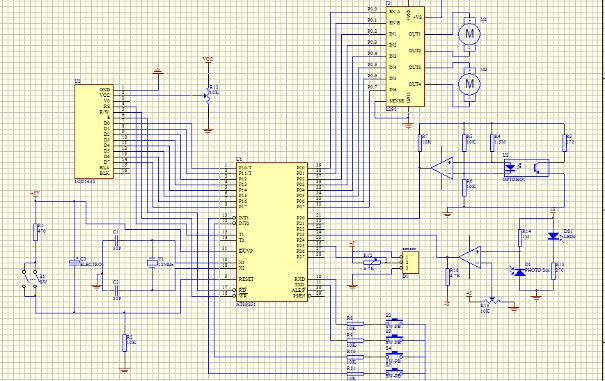
4.5 总电路图 21
第五章 智能小车系统的软件设计 22
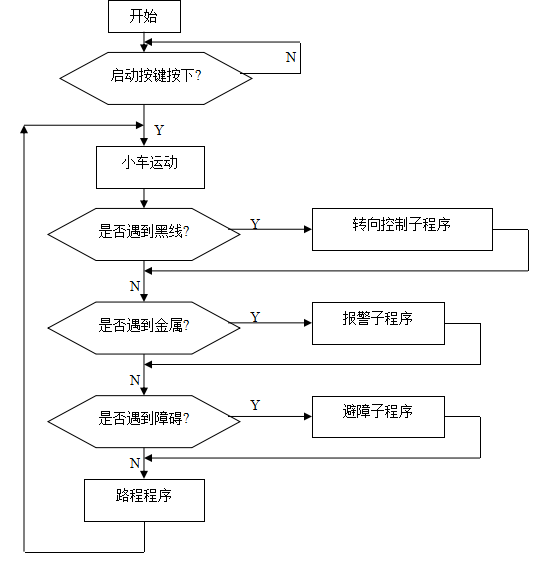
5.1 主程序流程图 22
5.2 步进电机方向及速度控制程序流程图 23
5.3 其他控制设计流程图 23
5.3.1金属探测及控制设计流程图 23
5.3.2红外避障及控制设计流程图 24
5.4相关程序 25
第五章 总结 26
致 谢 27
参考文献 28
附录 29
电机控制已成为现代工业自动化系统中不可缺少的重要组成部分,在现代科学技术和现代军事装备。它提供了一个广泛的应用范围,为炮兵雷达自动定位,船舵,飞机的自动驾驶仪控制,遥远的目标位置,并自动显示自动控制加工过程,远程控制阀,和机器人,计算机自动控制系统,自动记录仪器,医疗设备,录像设备等。智能车的设计,可以显示时间和行程,自动跟踪,自动避障,金属检测等功能。
作为一个学生,专业是机电一体化,有必要设计制造产品,全面提高机,电,光,综合应用能力是知识,从系统级的大师,电路级和芯片级设计,对各个层次的实现方法。基于以上原因,我选择了这个题目的设计,在设计过程中,利用多学科的理论知识,复习和巩固以前的知识,更重要的是培养了发现问题,分析问题,解决问题的能力,实践能力,是一种很好的实践,这将有助于今后的学习和工作。
根据设计要求,确定如下方案:在现有的两步进电机和万向轮车的基础上,光电跟踪装置,红外避障和金属探测器,对汽车的速度,位置运行状况的实时测量,将数据传输到AT89S51单片机,并将进行处理,然后由单片机根据测试数据实现小车的智能控制。该方案可以实现对车辆的运动状态进行实时控制。
本设计采用ATMEL公司的AT89S51单片机。AT89S51单片机为控制核心,红外检测道路上的障碍的使用,智能车控制的自动避障,检测车的反射式光电传感器走线,汽车的自动跟踪控制,利用金属探测器实现控制停车。
通过这次毕业设计,我收获了很多,在学习了很多没有学习专业知识和应用知识的一个方面,另一方面也提高了一个自己动手能力的项目。本次毕业设计是为了锻炼我的能力,这是一个测试。一些成果,是非常有价值的,是非常有意义的。
我学到了很多在毕业设计过程的新知识。是一个用在我的实践中的一个很好的机会,让理论知识与实践相结合。
在本次毕业设计是为了锻炼我的其他方面的能力,提高自己的综合素质。首先,它锻炼我做项目的能力,提高他们的独立思考和动手操作的能力,在工作的过程中,复习以前学过的知识,并掌握一些知识应用技术等。
在信息时代,学习是不断吸收新的信息,动态的职业进展。作为一个年轻的学生应该把学习作为保持工作积极性的重要途径。去工作,我会积极的电话应答装置,结合工作实际,学习理论,知识和社会知识,用先进的理论武装头脑,提高使用复杂的商务知识的能力,以广泛的社会知识和扩大他们的视野。
在这次毕业设计中,我严格按照毕业设计规则。作为一个初出茅庐的大学生,我不会放松对自己的要求,我希望我开始学习热情对待每一个在未来的任务。毕业设计期间,虽然经常感觉很苦,很累,但苦中有乐,累的乐趣,也似乎是一个积极的努力。
毕业设计是个人综合能力测试。为了完成出色的工作,除了对办公室的基本知识渊博的知识,但也需要有一定的动手能力,操作能力,以应付突发错误的能力,而且能熟练操作常用办公软件。作为一名工作人员,还需要有较强的沟通能力,而且善于指导思想,调整和人际氛围。此外,还必须有较强的应变能力,组织管理能力和毅力。
本次毕业设计,我深刻的认识到了积累知识的重要性。俗话说:“要给学生一碗水,自己必须有一桶水。因为之前我一直认为这些事情不学好并没有太多的联系,而不是在一个方面,但在我们的综合知识水平。
可以说,本次毕业设计我学到的不仅是知识,丰富的经验。它也帮助我缩小理论与实践之间的差距。本毕业设计将有利于我们更好的未来的工作。我将珍惜这次毕业设计的机会,在未来的工作中我将所学理论知识和实践经验不断的实际工作,努力实现理想。
Mirosot’97,June,1997:5—16.
[2] 何希才《传感器及其应用电路》 北京:电子工业出版社,2001.
[3] 王晓明 《电动机的单片机控制》 北京:航空航天大学出版社,2003.
[4] 陈懂,刘蓉,金世俊 《智能小车的多传感器资料融合》、现代电子技术(电子元器件),2005.
[5] 李小宁.气动技术发展的趋势[J].机械制造与自动化.2003,2(2):1—4.
[6] 何钺.现代控制理论基础(机械类)[M]. 西安:西安交通大学出版社,1987.1—2.
[7] 易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,1999. 1—8,238—247.
[8] 谭浩强 《C程序设计》 北京:清华大学出版社,1999.
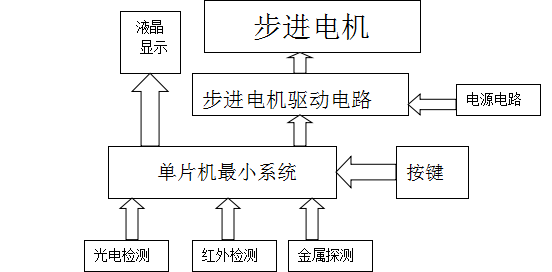
本课题是以单片机技术的智能汽车的发展,通过对路面的检测可以自动前进,转身,背等基本功能。控制单元的车由传感器和信号调理电路;步进电机及驱动电路的控制器三部分。汽车的行动离不开传感器通过红外光电传感器的两个层面,根据道路条件下的输出信号,由传感器检测到的微弱信号,通过信号调理放大器的比较将扩大。控制系统,在使用控制器按一定的时钟周期的光电探测器采样检测输入信号,根据光电探测器的状态,来确定汽车的动作,步进电机的控制信号输出到正确的,电机的旋转的实现。通过定时器中断实现用汇编语言编程控制汽车,改变定时器的初始值来控制小车的速度。电机的一部分,在这里采用的是四相八拍步进电机,实现只要某个时钟周期,以一个固定的控制字集的输出控制端四周期,由于左、右轮安装在扭转,前进两步进电机反转,的方向可以改变通电顺序,比如左转,左、右轮的旋转可以停止。另一方面,右转,左转右轮停止,为了使步进电机停止转动,只要其他固定相位控制字输出。
根据设计要求,确定如下方案:在现有的两步进电机和万向轮车的基础上,光电跟踪装置,红外避障和金属探测器,对汽车的速度,位置运行状况的实时测量,将数据传输到AT89S51单片机,并将进行处理,然后由单片机根据测试数据实现小车的智能控制。该方案可以实现对车辆的运动状态进行实时控制。
摘要:本论文的主要任务是一个智能小车的设计。近年来,随着科学技术的迅速发展,单片机的应用正在不断地走向深入。同时带动传统控制检测,日新月益更新。在单片机应用系统在实时检测和自动控制往往作为一个核心部件。单片机是把主要的计算机部件集成在一块芯片上的微型计算机,它是一种微控制器,数量和各种接口集成。
本设计以单片机为核心,对光电传感器和超声波传感器的应用,三的功能,在汽车上的成功实施。红外传感器的接口电路,直流电机和电源的硬件选择,每个传感器的设计和生产,以及设计和电路的传感器安装的位置,和硬件完成。此外,测试和控制软件的编程和程序设计,硬件和软件的结合,最终完成,有望实现汽车的功能。
智能作为现代的新发明,是未来的发展方向,他可以按照预先设定的环境中,模型的自动运行,不需要人为的管理,科学研究等方面的应用,智能电动小车就是其中之一。
关键词:智能小车、传感器、单片机
Smart car controlled by single chip microcomputer
Abstract:The main task of this thesis is the design and implementation of an intelligent car. In recent years, with the rapid development of science and technology, SCM applications are continually deepening. At the same time promote the traditional control detection, crescent benefit update. In application system of single chip microcomputer in real-time detection and automatic control is often used as a core component. SCM is the main computer components integrated on a single chip micro computer, it is a kind of micro controller, the number and variety of interface integrated.
The design of a microcontroller as the core, the application of the photoelectric sensor and ultrasonic sensors, three, in the car on the successful implementation of. The interface circuit of the infrared sensor, DC motor and the power of the hardware, the design and production of each sensor, position sensor and circuit design and installation, and the hardware. In addition, programming and design of test and control software, hardware and software combination, finally completed, is expected to achieve the function of the car.
Smart as a modern invention, is the future direction of development, he can be in accordance with the pre-set environment model, automatic operation, without human management, scientific research and other fields of application, smart electric car is one of them.
Keywords:Smart car, sensor, single chip microcomputer
目录
第一章 绪论 11.1引言 1
1.2 本课题的意义 1
1.3课题研究内容 2
第二章 智能小车机械结构介绍 3
2.1 智能小车的组成 3
2.2 装配示意图 3
3.1 设计要求 7
3.2 智能小车控制系统的构成方案 7
3.2.1 小车总体设计方案 7
3.2.2 基本模块设计方案 7
3.2.3 主控制电路 8
第四章 智能小车控制系统的硬件设计 10
4、1 控制系统组成 10
4、2 单片机的介绍以及选型 10
4.2.1 AT89S51介绍 11
4、3 单元硬件电路设计 14
4.3.1 单片机AT89S51核心模块 14
4.3.2 电源电路模块 16
4.3.3 光电寻迹模块 17
4.3.4 金属探测传感器模块 17
4.3.5 红外避障模块 18
4.3.6 按键控制模块设计 19
4.3.7 LCD显示电路 19
4.4 步进电机驱动设计电路 20
4.5 总电路图 21
第五章 智能小车系统的软件设计 22
5.1 主程序流程图 22
5.2 步进电机方向及速度控制程序流程图 23
5.3 其他控制设计流程图 23
5.3.1金属探测及控制设计流程图 23
5.3.2红外避障及控制设计流程图 24
5.4相关程序 25
第五章 总结 26
致 谢 27
参考文献 28
附录 29
第一章 绪论
1.1引言
随着现代科学技术的迅速发展,单片机已经在各个领域得到了越来越广泛的应用。单片机由于其体积小,低功耗和两个基本特征,在通讯,家用电器,工业控制,仪器仪表,汽车和其他产品中可以看到图中单片机。随着集成电路技术的迅猛发展,近年来单片机技术的发展,可以分为两个方面:一方面是集成的功能越来越多的单片机内部硬件;另一方面,从汇编语言到高级语言C开发手段,计算机仿真和调试,单片机应用系统的设计。电机控制已成为现代工业自动化系统中不可缺少的重要组成部分,在现代科学技术和现代军事装备。它提供了一个广泛的应用范围,为炮兵雷达自动定位,船舵,飞机的自动驾驶仪控制,遥远的目标位置,并自动显示自动控制加工过程,远程控制阀,和机器人,计算机自动控制系统,自动记录仪器,医疗设备,录像设备等。智能车的设计,可以显示时间和行程,自动跟踪,自动避障,金属检测等功能。
作为一个学生,专业是机电一体化,有必要设计制造产品,全面提高机,电,光,综合应用能力是知识,从系统级的大师,电路级和芯片级设计,对各个层次的实现方法。基于以上原因,我选择了这个题目的设计,在设计过程中,利用多学科的理论知识,复习和巩固以前的知识,更重要的是培养了发现问题,分析问题,解决问题的能力,实践能力,是一种很好的实践,这将有助于今后的学习和工作。
1.2 本课题的意义
科学的进步和技术的智能产品,单片机的应用正在加快发展步伐,其应用范围越来越广泛,远远超出了计算机科学领域。小玩具,信用卡,给飞船,汽车,数据采集,实现过程控制,模糊控制,智能系统对人类的日常生活,都离不开单片机,本设计是单片机的一个典型应用。本设计通过对无人驾驶汽车的实现,通过对道路的检测,通过单片机来确定控制小车的反应,使其成为智能,自动前进,转弯,停止功能。该系统还可应用于检测后的道路,不断提高安全巡逻,能满足社会的需要。1.3课题研究内容
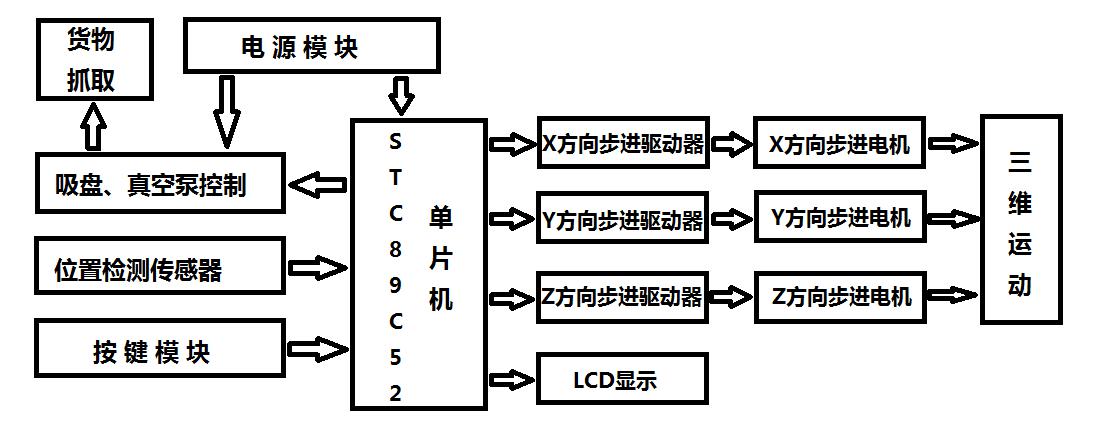
本课题是以单片机技术的智能汽车的发展,通过对路面的检测可以自动前进,转身,背等基本功能。控制单元的车由传感器和信号调理电路;步进电机及驱动电路的控制器三部分。汽车的行动离不开传感器通过红外光电传感器的两个层面,根据道路条件下的输出信号,由传感器检测到的微弱信号,通过信号调理放大器的比较将扩大。控制系统,在使用控制器按一定的时钟周期的光电探测器采样检测输入信号,根据光电探测器的状态,来确定汽车的动作,步进电机的控制信号输出到正确的,电机的旋转的实现。通过定时器中断实现用汇编语言编程控制汽车,改变定时器的初始值来控制小车的速度。电机的一部分,在这里采用的是四相八拍步进电机,实现只要某个时钟周期,以一个固定的控制字集的输出控制端四周期,由于左、右轮安装在扭转,前进两步进电机反转,的方向可以改变通电顺序,比如左转,左、右轮的旋转可以停止。另一方面,右转,左转右轮停止,为了使步进电机停止转动,只要其他固定相位控制字输出。根据设计要求,确定如下方案:在现有的两步进电机和万向轮车的基础上,光电跟踪装置,红外避障和金属探测器,对汽车的速度,位置运行状况的实时测量,将数据传输到AT89S51单片机,并将进行处理,然后由单片机根据测试数据实现小车的智能控制。该方案可以实现对车辆的运动状态进行实时控制。
本设计采用ATMEL公司的AT89S51单片机。AT89S51单片机为控制核心,红外检测道路上的障碍的使用,智能车控制的自动避障,检测车的反射式光电传感器走线,汽车的自动跟踪控制,利用金属探测器实现控制停车。
总结
在这里首先要感谢老师对我的毕业设计指导和帮助。通过本设计,深深地感受到理论与实践之间的差距。通过这次毕业设计,我收获了很多,在学习了很多没有学习专业知识和应用知识的一个方面,另一方面也提高了一个自己动手能力的项目。本次毕业设计是为了锻炼我的能力,这是一个测试。一些成果,是非常有价值的,是非常有意义的。
我学到了很多在毕业设计过程的新知识。是一个用在我的实践中的一个很好的机会,让理论知识与实践相结合。
在本次毕业设计是为了锻炼我的其他方面的能力,提高自己的综合素质。首先,它锻炼我做项目的能力,提高他们的独立思考和动手操作的能力,在工作的过程中,复习以前学过的知识,并掌握一些知识应用技术等。
在信息时代,学习是不断吸收新的信息,动态的职业进展。作为一个年轻的学生应该把学习作为保持工作积极性的重要途径。去工作,我会积极的电话应答装置,结合工作实际,学习理论,知识和社会知识,用先进的理论武装头脑,提高使用复杂的商务知识的能力,以广泛的社会知识和扩大他们的视野。
在这次毕业设计中,我严格按照毕业设计规则。作为一个初出茅庐的大学生,我不会放松对自己的要求,我希望我开始学习热情对待每一个在未来的任务。毕业设计期间,虽然经常感觉很苦,很累,但苦中有乐,累的乐趣,也似乎是一个积极的努力。
毕业设计是个人综合能力测试。为了完成出色的工作,除了对办公室的基本知识渊博的知识,但也需要有一定的动手能力,操作能力,以应付突发错误的能力,而且能熟练操作常用办公软件。作为一名工作人员,还需要有较强的沟通能力,而且善于指导思想,调整和人际氛围。此外,还必须有较强的应变能力,组织管理能力和毅力。
本次毕业设计,我深刻的认识到了积累知识的重要性。俗话说:“要给学生一碗水,自己必须有一桶水。因为之前我一直认为这些事情不学好并没有太多的联系,而不是在一个方面,但在我们的综合知识水平。
可以说,本次毕业设计我学到的不仅是知识,丰富的经验。它也帮助我缩小理论与实践之间的差距。本毕业设计将有利于我们更好的未来的工作。我将珍惜这次毕业设计的机会,在未来的工作中我将所学理论知识和实践经验不断的实际工作,努力实现理想。
参考文献
[1] J H Kim.Cooperation Multiagent System:From the Rpbot soccer PerspecTive[J]. proc.Mirosot’97,June,1997:5—16.
[2] 何希才《传感器及其应用电路》 北京:电子工业出版社,2001.
[3] 王晓明 《电动机的单片机控制》 北京:航空航天大学出版社,2003.
[4] 陈懂,刘蓉,金世俊 《智能小车的多传感器资料融合》、现代电子技术(电子元器件),2005.
[5] 李小宁.气动技术发展的趋势[J].机械制造与自动化.2003,2(2):1—4.
[6] 何钺.现代控制理论基础(机械类)[M]. 西安:西安交通大学出版社,1987.1—2.
[7] 易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,1999. 1—8,238—247.
[8] 谭浩强 《C程序设计》 北京:清华大学出版社,1999.
本课题是以单片机技术的智能汽车的发展,通过对路面的检测可以自动前进,转身,背等基本功能。控制单元的车由传感器和信号调理电路;步进电机及驱动电路的控制器三部分。汽车的行动离不开传感器通过红外光电传感器的两个层面,根据道路条件下的输出信号,由传感器检测到的微弱信号,通过信号调理放大器的比较将扩大。控制系统,在使用控制器按一定的时钟周期的光电探测器采样检测输入信号,根据光电探测器的状态,来确定汽车的动作,步进电机的控制信号输出到正确的,电机的旋转的实现。通过定时器中断实现用汇编语言编程控制汽车,改变定时器的初始值来控制小车的速度。电机的一部分,在这里采用的是四相八拍步进电机,实现只要某个时钟周期,以一个固定的控制字集的输出控制端四周期,由于左、右轮安装在扭转,前进两步进电机反转,的方向可以改变通电顺序,比如左转,左、右轮的旋转可以停止。另一方面,右转,左转右轮停止,为了使步进电机停止转动,只要其他固定相位控制字输出。
根据设计要求,确定如下方案:在现有的两步进电机和万向轮车的基础上,光电跟踪装置,红外避障和金属探测器,对汽车的速度,位置运行状况的实时测量,将数据传输到AT89S51单片机,并将进行处理,然后由单片机根据测试数据实现小车的智能控制。该方案可以实现对车辆的运动状态进行实时控制。