






��ICP��112451047180��-6
����Dijkstra�㷨���ƶ�������ȫ�ֱ��ϲ����о�
ժҪ
���ִ�����У������˵õ��˿��ٷ�չ�����ڶ�����õ��㷺Ӧ�á����Թ��ҵĹ�ҵ��չ�������Ľ����Լ���������������ش��Ӱ�죬����Ӱ����Խ��Խ���ڻ������ӵ�����¾���Ҫ���������˵İ��������ֺ��Ѿȣ�������������̽���ȡ���ô������·���滮���Ե���Ϊ���á�
·���滮���ƶ��������о��������Ҫ���ݣ�Ҳ��һ�ֱȽϵ��͵��Ż����⡣·���滮Ŀǰû����õ��㷨���Ժ������У�·���滮�㷨Ӧ�öԹ滮�ٶȺ�����·���������ء�Ŀǰ��ʹ�÷������˹��Ƴ������Ŵ��㷨��A-star�㷨��Dijkstra�㷨�ȡ�
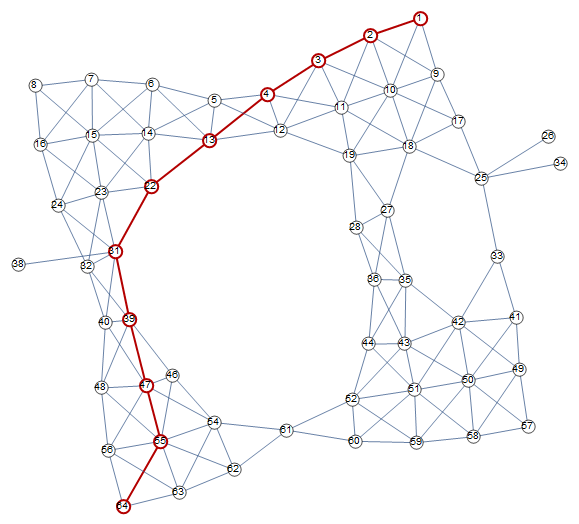
���������ھ�̬ȫ��ʵ�廷����֪��ͨ��դ���л�����ģ���ص��о�������ȫ��·���滮��Dijkstra�㷨��Ϊ������Ѱ��һ���ӳ�ʼ״̬��Ŀ��״̬����������ײ·����ͨ����Mathematica���з���ʵ�飬����ʵ�ֻ��������������ű���·������Ŀ��㲢�ܿ��ϰ��
�������ؽ������ƶ������˱��Ϻ�·���滮�г��õ��ķ����������е�դ������ͼ�����˹��Ƴ������Ŵ��㷨��������ϸ�ķ��������ν��ƶ������˵��˶������˼�ֻ����8��������˶����������ޣ�û�취��Բ���˶���С���˶���������ķ��������ĵijɹ��ǶԴ�ͳ�㷨dijkstra�����������������ɢ��ѧ�е�ͼ��֪ʶΪ�������������㷨��ʵ������µ����á�����ѧ�ĽǶȽ���ʵ�ʲ������ڱ�̷������������������ͨѶ�ӿڣ���ͼ���е�ͼͨ����д�ڽӾ��������ɻ��ơ�����mma�������㷨�ͻ���������ģ��ʵ�顣ʵ�����ͷ���֤�����㷨�Ŀ����ԣ����⣬�����ʶ�˸��㷨��ȱ�ݺͿɸĽ�֮����
�����Ľ�β��ȫ�Ľ������ܽᲢ����̵ķ�����dijkstra�㷨������֮�����Լ����÷�Χ��
�ؼ��֣�Dijkstra�㷨�������ˣ�·���滮��Mathematica��
Ŀ¼
ժҪ 2
Abstract 3
һ������ 4
1.1����ı��������� 4
1.2��Ҫ�о����ݼ��ؼ����� 6
1.3���Ľṹ 6
����·���滮���� 7
2.1·���滮����ķ��༰���� 8
2.2������ģ���� 8
2.2.1����ͼ�� 9
2.2.2դ�� 9
����Dijkstra�㷨�ĸ��� 11
3.1Dijkstra�㷨����ԭ�� 12
3.2Dijkstra�㷨˼�����ѧģ�� 12
3.3ʵ������ 13
�ġ�����Dijkstra�㷨��ȫ�ֹ滮 14
4.1������ģ 14
4.2�㷨Ӧ�� 17
�塢ʵ����漰������� 19
5.1����ʵ�� 19
5.2������� 22
�����ܽ� 23
����� 24
һ������
1.1����ı���������
���ſƼ�ˮƽ����ߣ����������˼��ٳɳ����ڴ�������õ��㷺���á����Թ��ҵĹ�ҵ��չ�������Ľ����Լ���������������ش��Ӱ�죬Ӱ����Խ��Խ���ڻ������ӵ�����¾���Ҫ���û����˵������������ֺ��Ѿȣ�������������̽���ȡ���ô������·���滮���������˱��ϵĹؼ���
·���滮�ǵ��͵��Ż����⣬·���滮Ŀǰû����õ��㷨���Ժ������У��õ�·���滮�㷨Ӧ�öԹ滮�ٶȺ�����·������ݡ�Ŀǰ��ʹ�õ��㷨���˹��Ƴ������Ŵ��㷨���������㷨��Dijkstra�㷨�ȡ������Ƕ��˹��Ƴ������Ŵ��㷨�������������
�˹��Ƴ����ǹ���һ�ֲ����ڵ������ķ�ʽ�о������ĸ���ʹ����������ٶȣ��Ӷ�ʹ�����������˶�����ʵ�ʻ�������̽�������˲��Ǿ�ֹ״̬ʱ������Ϊ������Ϊ����������µ��˶���������Դ��Ŀ��㣬�����˺���Ŀ�������߾������ķ���ָ��Ŀ�������ĴӶ��������ٶȣ�ʹ�û����˳���Ŀ����ƶ����Ӷ��ﵽ�յ�λ�á�����һ������£���������ϰ�Ⱥ�Ի����˵��ƶ������谭�����Ϊ��ʹ�û����˱ܿ��ϰ���趨�ϰ���Ի������г������ã���������Ϊ�����˺��ϰ�������߷���ָ������˵����ĴӶ�����Զ���ϰ���������ɼ��ٶȣ��ﵽ�ܿ��ϰ��������������뾲ֹ״̬���»�������Զû�л����ƶ���Ŀ����λ�á���ʵ�ʻ����У��ϰ����Ŀ��㹲ͬ�������ĺ������ƶ������˵��ƶ����п��ơ����������������ɣ�����֮��ľ���ԽС�������ĵ���Խ����ˣ����������У�������ÿʱÿ�����ܵ�������С�ͷ����ڸı䣬
���Ŷ������ٶ�Ҳ���Ÿı䣬�ƶ��Ĺ켣ͨ����˵û�й��ڽӽ��ϰ�������˵·��ƽ���������м�������»ᵼ�»����˵ĺ���Ϊ��㣬�������㣬�û����˳��־�ֹ״̬���Ӷ�·�����뽩�֣�����ѭ����ԭ�㡣��һ������£��ϰ����Ŀ���֮��Ŀռ����볤�����㷨��������ܿ��ϰ���Ѹ�ٵĵ���Ŀ��㣬��Ϊ��������ʼ�ճ���Ŀ��㡣��ʵ�ʻ����У�һ������ϰ���Ŀ�����Զ���������������ʱ�������˳���Ŀ��������ʱ����Ҳ�����ϰ�������ͻ��������Զ������Ŀ���������
Ϊ����Ҫ�������ͳ����Ĵ�С���ж������������������������ͳ������ĸ���趨��������������Ķ࣬�Ӷ������ܵı�����������ķ��������¾ֲ����Ž���֣���������ѭ���ļ���֮�С������㷨�ŵ���ȷѰ��Ŀ����λ�ã��������ƶ��Ĺ����д�����������ȴ��㷨�Ľ���������Ч�ʸߣ�������ƶ��ǿ���ͬ�����еġ��ռ�Ĵ洢Ҫ�ߡ�������Ϊ�ؼ����Dz������趨�������������ͳ���������Ϊ��Ҫ��һ��С�IJ����ı䣬����������·���滮��ʧ�ܡ���Ҫ��ε�ģ����ԣ��ſ��Խ������趨Ϊ�����ڵ�ǰ�����ģ�·�������־ֲ����Ž⡣ʮ��������ʵ�ʻ�����Ϣ��
�Ŵ��㷨�Ǵ���Ȼѡ��ĽǶȽ�����̭�������㷨���Ŵ��㷨�����ݿⱻ��ΪȺ�塣ÿһ�����ݳ�Ϊһ�����壬���㷨�ʹ�ͳ�㷨������IJ�ͬ���ڣ����Ǵӵ���������ֵ����������⣬���Ǵ����������γɵ�Ⱥ�忪ʼ�����ģ��ǴӴ�ֵĹ������ֵ��㷨��������ֻ��Ը���ĺ���ֵ���з������Ϳɵó���ǰȺ���ƽ��������Ӧ�ȣ�����Ҫ�����ĸ�����Ϣ���������Ĺ�����ͨ����������ֲ����Ž�����⣬������Ը�������ʱҲ��ʹ�ã��������Ͽ����ҵ��������Ž⡣���Ŵ��㷨�У����Ŀ��ĺ���ֵת��Ϊ��Ӧ��������ֻ������Ⱥ���ƽ����Ӧ�ȴﵽ�����Ӧ�ȾͿ���ֹͣ�����ڲ��IJ�����
���������������ԭ�����ֽ�ÿһ������ֵת��Ϊ��Ӧ����Ӧֵ����������ÿһ����������ӣ�����һ�����Ŵ��������з��࣬ͨ��ʹ�����ֲ����ֱ�Ϊѡ����ͱ��졣
ѡ�������Ϊ���Ⱥ���ƽ����Ӧֵ�����ķ�Χ�ǽ���ǰȺ��ĸ��尴��ռ�������ɵ��µ�Ⱥ���У����γɵĽ�����壬����ǰȺ����������һ����Ⱥ���һ�����һ���Ĺ��ɵIJ��ֵ��м�Ⱥ�塣ѡ�����ӵļ��벢û���γ��µĸ��壬����ڵ�ǰȺ����û���κ�һ�������иĽ����������ǽ������ӣ�������������µĸ��壬���Ὣ����Ⱥ�����������������ԣ������µĸ��壬�����µ�ǰȺ�壬��ʱ�ͻ����ƽ��������Ӧ�ȡ��������ַ�ʽ�ӽ��ȶ���Ӧ�ȣ�Ҳ����˵�����������Ⱥ���ȫ�������ڽ������ӵ�ʹ�ù����У������н���������������������Ҳ���µ�Ⱥ�����ɣ���ֻ����С���֡�
�����������Ǹ��㷨�ľֲ����֣��������Ŵ��㷨�ľֲ�̽����ؼ����á������������ӵ�����£�������ɶ���̽���ռ��ȫ��������Ǿֲ�����������
�����ڽ�����ӻ�������Ч���㷨�����϶�Ӧ����Ӧ�Ⱥ������Ŵ����ӵ���Ʒ��棬���ڼ�������ѡ�ͨ���Ŵ��㷨����������ʱ��������㷨�����ٶ�������ռ�ݵ�ʱ��Ҫ��ܴ����ԶԱ�����㷨�������Լ������ӵĹ���Ҫ��ܸߡ��Ŵ��㷨�ı���������Ⱥ������ĸ�����������֣����������Ʒ�����Ⱥ��������Ľ�����ȥ��ʵ���ϴ��ڿռ��Ҫ����ռ�ļ���Ҳ���Ŵ��㷨����Ҫ����ġ�����ȫ�ֵ�·�������������ʱ����������Լ���ء�
1.2��Ҫ�о����ݼ��ؼ�����
���������֪��ȫ�־�̬�����£���դ��������ģ�ͣ�����dijkstra�㷨�Ի�����ȫ��·���滮��Ϊ������Ѱ��һ��������ʼ���Ŀ��������ײ·��������ʹ��mathematica�������з���ʵ�飬��dijkstra�㷨����Ч�Ժ�Ч���������ۣ��Լ��Թ滮������·���Ŀ����Ե��ж���
1.3���Ľṹ
���ĵ���Ҫ�ṹ��
��һ�£�����������ı��������壬�Ƚ�Ŀǰ�˽�ij��õ���·���滮�㷨�����������Dijkstra�㷨�Ի�����·���滮�����⡣
�ڶ��£�����������·���滮�����⣬���ܻ�����ģ�ķ�����
�����£�����Dijkstra�㷨�����������ԭ���������̣�������ѧԭ������ѧģ�͡�
�����£�����Dijkstra�㷨��ȫ�ֹ滮�о�����Dijkstra�㷨Ӧ�õ������˵ı���·���У�����դ�Ի������н�ģ���������㷨��ʵʩ���衣
�����£���д���������з���ʵ�飬������ʵ������
�����£�ȫ���ۺϵó����ۡ�
�����
[1] ̷��, ��˶. �����˼����о���չ. �Զ���ѧ��, 2013, 39(7): 963¡972
[2] ��壬Ф�˹�Ҧ�� һ�ֻ��ڿ���ͼ���Ļ�����ȫ��·���滮�㷨 ������ҵ��ѧѧ��.2009 31 225-229.
[3] (��) �����Ħ�ף��У������棨�����Ķ�����˼��������˲�������ѧ����[M].������е��ҵ������,2007.
[4] �����������ֿ�.�����Ƴ������ƶ�������·���滮�����о�[J].�����������Ӧ��,2007,43,24:226-228.
[5] ������ ��������ڸĽ� Dijkstra �㷨�Ļ�����·���滮���� [A] �����˼��� 2007.
[6] ��һ�� κ �� ������ ����դ�������˿���·���滮 [A] 1000-7024 (2008) 05-1229-02