














苏ICP备112451047180号-6
基于51单片机扫地机器人电路设计
摘要:
目前,各式各样的服务机器人越来越多的运用到人们的日常生活中,从事于人们生活相关的服务工作,极大提高了人们的生活质量。本文以家用扫地机器人为背景。介绍了扫地机器人的组成部件及各部件的功能,并设计了机器人的避障系统,使其能够做简单动作。
本文设计是基于AT89C51的扫地机器人。采用超声波传感器来进行前方障碍物检测,然后通过单片机来控制两个直流电机实现左、右转弯来避开障碍物。
本文最后提出了在扫地机器人底部增加超声波及紫外线灯,可以有效的清洁地毯,沙发等纺织品上的细菌、螨虫。这为以后的扫地机器人的开发提供了一个可行方向。
关键词:扫地机器人 单片机 直流电机 设计
目次
1 绪论 1
2 扫地机器人的机械结构 4
2.1 机械结构组成 4
2.2 扫地机器人的移动方式 5
3 扫地机器人的关键技术 6
3.1 控制系统 6
3.1.1 AT89C51系列单片机简介 6
3.1.2 AT89C51系列单片机芯片的信号引脚 7
3.2电源电路 7
3.3传感技术 8
3.3.1 超声波测距原理 9
3.3.2 系统硬件电路设计 9
3.3.3 防止干扰 10
3.4 驱动系统 10
3.4.1 直流电机 10
3.4.2 电机驱动 12
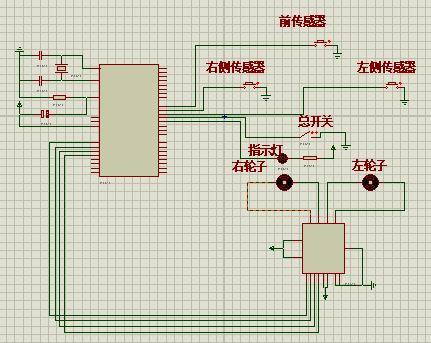
3.5仿真 12
4 程序设计 14
4.1 流程图的设计 14
4.2 原理图的设计 15
4.3 程序设计 15
4.4 仿真 18
结 论 21
致 谢 22
参考文献 23
结 论
本设计到此就全部结束了,该设计结合市场上已有的扫地机器人的模型,加上作者自己的设计构思,终于完成。本设计涉及传感器、电机、单片机、模具等多方面知识。
此次设计主要重点是分析扫地机器人的关键技术,利用超声波测距技术来避障、防跌落;用电动机配合齿轮来驱动整个机器,并用电机配合风扇达到吸尘效果;用单片机控制电路,将传感信号反馈并作用于电机,使得机器转弯,避开障碍物。但本设计也有许多不足之处,例如不携带语音功能,不能自动充电,程序只设计了避障这一个功能。
扫地机器人的市场前景十分广阔,还有很多的方面有待开发。就像开头提到的,可以在其底部增加杀菌功能,也可以在其顶部增加增湿设施,来增加室内湿度。相信随着科学技术的进步,这些技术都会被开发出来,扫地机器人的应用定将越来越全面。
参 考 文 献:
[1] 沈中城. 检测技术与仪器[M]. 北京:高等教育出版社,2003.
[2] 陶亦亦. 电气控制与PLC应用[M]. 北京:清华大学出版社,2010.
[3] 李俊德. 电机控制与维修[M]. 北京:化学工业出版社,2009(8).
[4] 鲁伦文. 单片机原理及应用[M]. 北京:北京科学技术出版社,2010.
[5] 张培仁. 基于C语言编程MCS-51单片机原理与应用[M]. 北京:清华大学出版社,2002.
[6] 王守中. 一读就通51单片机开发[M]. 北京:电子工业出版社,2011.
[7] 边莉. 51单片机基础与实例进阶[M]. 北京:清华大学出版社,2012.
[8] 宗光华. 机器人的创意设计及实践[M]. 北京:北京航空航天大学出版社,2004
[9] 谭庆昌. 机械设计[M]. 长春:吉林科学技术出版社,2000