














苏ICP备112451047180号-6
基于51单片机智能循迹小车设计
摘要:智能,毋庸置疑成为当今最热门的技术,这是一个从以前需要有人在旁边监督指导到现在不需要人做多余的动作的技术,它可以不通过任何后续的人为动作就能够按照之前设定的程序自动地运作。物品与物品与网络的相互连接时代的到来,智能车辆已经成为了全球关心的重点。本计划首要是一种大抵分为总体方案计划、硬件计划和软件计划,而且采取了节制模块、电源模块、机电驱动模块等计划原则,采用单片机的智能车辆体系。这个系统的设计和原先的传统电路相比较,能更加稳定,采用51单片机为核心的控制电路,再由转向和动力来实现小车在设计的线路上自动循迹的功能。
关键词:智能车辆;AT89C51单片机;循迹
目录
一、绪论 1
1.1课题背景 1
1.2智能循迹小车概述 1
二、智能循迹小车体系计划方案 1
2.1循迹原理 1
2.2体系整体框架 2
2.3轨道检测模块 2
2.3.1 传感器模块 2
2.3.2放大器方案 2
2.4控制模块 3
2.5电机驱动 3
2.5.1电动机模块 3
2.5.2转向和动力 3
2.5.3调速系统 4
2.5.4电机驱动模块 4
2.6电源模块 5
2.7显示模块 5
2.8系统工作原理 5
三、硬件设计 6
3.1电源模块设计 6
3.1.1智能小车的电源设计主要内容 6
3.1.2 LM2940低压差稳压芯片介绍 6
3.2单片机最小体系计划 7
3.3前向通道设计 9
3.3.1后向通道简介 12
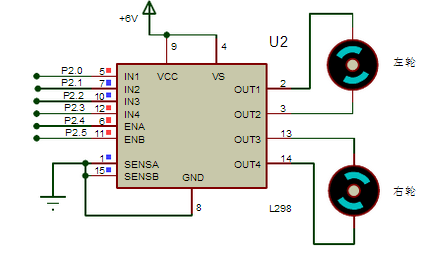
3.3.2后轮电机驱动模块设计 12
3.4PWM调速简介以及实现 14
四、软件设计 15
4.1系统总体流程图 15
4.2程序的模块化设计 16
4.2.1小车循迹流程图 16
4.2.2定时器中断程序流程图 18
五、仿真结果分析 19
六、结束语 21
致谢 22
参考文献 23
附录 24
一、绪论
1.1课题背景
时代在不断地发展,企业生产的技术也在不断提高,自动化技术在企业的生产技术中尤为重要,也是以后主要的生产方法,对这方面的需求也变得很强烈。智能小车几乎已经成为了无人管理运输等方面的核心产品。对智能车辆的计划钻研与开辟已经成为了今朝世界上很多国度正在踊跃动手的题目。智能小车也被称为无人小车,它能够通过传感器了解四周,能自身做出判断,给出解决方案。它的作用包括了主动连结车距、节制速率、循迹、主动制动等等方面。智能小车能够应付几乎所有的路面情况,完成其目的。
1.2智能循迹小车概述
智能循迹小车概述智能循迹小车具备主动扶引装配,比方电磁,光学等,可以使小车沿着预先设定好的线路进行行驶。产业利用中一样平常采取蓄电池作为动力来历,可以经由过程电脑编纂法式来节制智能小车的活动轨道或其他行动。一般可将电磁轨道贴在地上,智能小车通过电磁轨道来确定行进的路线从而进行移动,无需人为操作,可将需要被运送的物资从出发点运到目的地。
参考文献
[1]陈志楚.基于AT89C52的电动智能小车系统设计[J].赤峰学院学报(自然科学版).
[2]张树伟,李颖.基于单片机自动排爆机器人的研究与设计[J].科技创新导报.
[3]张一星.小型农业机器人试验平台设计与试验[D].西北农林科技大学.
[4]王文华.基于80C51单片机的智能小车设计[D].山西电子技术.
[5]王迪.基于ARM的采摘机器人关节运动控制研究.[D].东北林业大学.
[6]黄建杰.基于PIC的智能炒菜机动作测控系统设计.[D].广东工业大学.
[7]张志胜.基于视觉导航的自动移动机器人的设计与研究.[D].哈尔滨工业大学.
[8]李慧,李秀歌,娄利峰.飞思卡尔智能车设计方法探讨.[J].长春工程学院学报(自然科学版).
[9]于家圣.喷浆机械手比例型无线遥控系统的研究.[D].山东科技大学.