














苏ICP备112451047180号-6
基于无线通信的多传感器智能小车设计
一、选题简介、意义
随着信息技术的快速发展,智能化技术凭借着强大的发展优势和影响力渗透到越来越多的传统行业中,智能化与人类生活的关系越来越密切,智能化将是未来社会发展的必然趋势。其中包括汽车工业,关于智能汽车的研究越来越多,相关的竞赛包括各高校都开始重视该课题。智能小车凭借着成本低廉,性能好等优点开始深入到医疗事业以及社会的各行各业中。本次课题研究的过程中,涉及到传感技术、无线通信技术、自动控制技术等技术,是现代高新技术的典型集合。这些技术已经广泛应用到国防军事、医疗卫生、农业生产等相关领域,综上所述智能小车具有及其重要的研究意义。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
研究内容:使小车能够自动寻迹,能够自动避开障碍,然后到达指定地点,探测到相关物质的各项属性,比如:温度、湿度、烟雾的浓度等,然后通过发射器将这些数据反馈到显示屏上。
预期目标:
(1)具有寻迹功能;
(2)具有测量障碍距离功能;
(3)具有测量温度、湿度、烟雾等环境状况的测量,精度±1%;
(4)能进行无线通信。
研究步骤、方法及措施:
硬件方面:设计电路板,其中电路板的制作和调试是最主要的。
软件方面:传感器对当前路径的感知,设计编程使控制器按照一定的周期进行采样检测,通过检测器反馈的状态,来决定小车的方向。小车自动寻找所需路线,能够自行避障无需用户干预。
目录
第一章 绪论 3
1.1基于无线通信的多传感器智能小车课题的背景及意义 3
1.2基于无线通信的多传感器智能小车的国内外研究现状 3
1.3基于无线通信的多传感器智能小车的技术特点 4
1.4基于无线通信的多传感器智能小车课题研究的内容 4
第二章 基于无线通信的多传感器智能小车系统的总体设计 5
2.1 基于无线通信的多传感器智能小车系统的整体方案设计思路 5
2.2基于无线通信的多传感器智能小车系统的主要应用硬件模块和软件模块 5
2.2.1上位机模块 5
2.2.2单片机模块 6
2.2.3电机驱动模块 6
2.2.4温湿度采集模块 6
2.2.5红外避障模块 6
第三章 基于无线通信的多传感器智能小车系统的硬件电路设计 7
3.1基于无线通信的多传感器智能小车系统的电源模块 7
3.2基于无线通信的多传感器智能小车系统的电机及其驱动模块 7
3.2.1电机模块 7
3.2.2 电机驱动模块L293D 8
3.3 基于无线通信的多传感器智能小车系统的温湿度传感器模块 11
3.3.1有关数字信号“总线线路””的特点介绍如下: 11
3.3.2有关温度传感器DS18B20信息的介绍如下: 11
3.4 基于无线通信的多传感器智能小车系统的红外避障模块 12
3.5基于无线通信的多传感器智能小车系统的单片机模块 13
3.6基于无线通信的多传感器智能小车系统的无线收发模块 15
第四章 基于无线通信的多传感器智能小车系统的软件电路设计 18
4.1基于无线通信的多传感器智能小车系统的软件设计思路 18
4.2基于无线通信的多传感器智能小车系统的上位机主程序 18
4.3基于无线通信的多传感器智能小车系统的下位机主程序 19
4.3.1 单片机控制 19
4.3.2 温湿度采集子程序 20
4.3.3 电机子程序 20
4.3.4 避障子程序 21
4.3.5 串口通信子程序 21
4.4基于无线通信的多传感器智能小车系统的通信及其协议 21
第五章 基于无线通信的多传感器智能小车系统调试和结果分析 22
5.1 基于无线通信的多传感器智能小车系统的难点与创新 22
5.2 基于无线通信的多传感器智能小车系统的测试结果讨论 22
第六章 总结和展望 23
小结与致谢 24
参考文献 25
附录 26
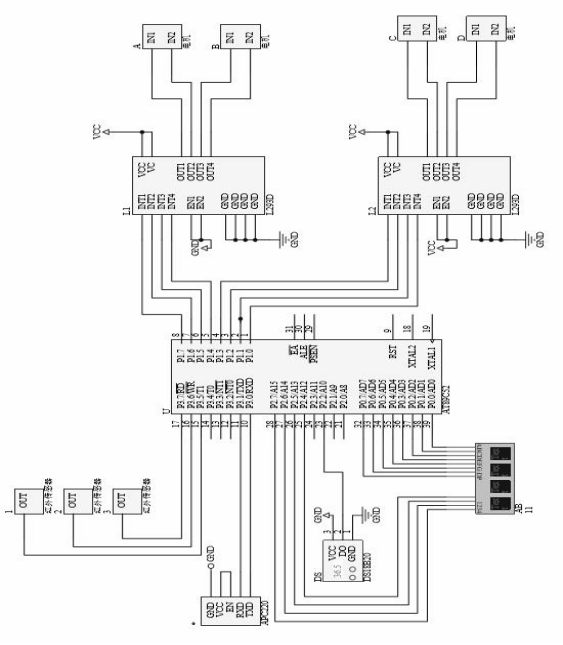
【附录1 系统整体框架图】 26
【附录2 下位机主程序】 27
第一章绪论
1.1基于无线通信的多传感器智能小车课题的背景及意义
在研究这个课题的过程中,我了解一下我们日常中有关智能化的应用。人工智能技术不断取得进步,机器人技术已经逐渐进入人类的眼中。机器人技术涉及了传感技术、无线通信技术、自动控制技术等多种技术,是现代高新技术的典型集合。无线通信智能小车是通过其本身的多传感器对周围环境和自身状况进行感知,来判断所处环境状况从而实现目标的自主运动,同时在运动的过程中能够实施探测障碍的功能的移动机器人。其中,如何选择合适的传感器来感知外部环境,是智能小车的在前进过程中的主要问题。作为信息产业的三大支柱,计算机相当于大脑,通信技术相当于神经中枢,传感器相当于神经触角,共同组成了一个完整的神经体系,该系统应用到各个行业中。在信息采集的过程中,一方面要把各个传感器收集到的信息联系到一起;另一方面又要根据相同环境采集到的信息进行融合,协调各个传感器之间的工作,从而提高工作效率,获得更加精准的信息。因此对无线通信小车的研究需要更加的重视,挖掘出其更大的潜力来开拓更大得市场。
1.2基于无线通信的多传感器智能小车的国内外研究现状
现在的移动机器人研究的很多。德国、中国、英国等国家都在机器人技术的研究领域中,占据了一定的份额。相对于国内的研究而言,国外的机器人技术比较早。早在60年代末提出了相关内容。80年代中期,全球掀起机器人热潮。通用电气,本田等世界知名公司开始研究移动机器人,并促进移动机器人的快速发展。我们对机器人的重要性的认识比较晚,但发展的比较快,研究人员和学者们根据国内外的发展趋势和机器人的技术特点,我们已经在智能机器人的探索取得了显着成效。80年代,中国为了跟踪国外的技术,国家已在研究智能机器人、智能机器人的建造、高科技技术、传感器和其他控制的应用程序开发,提供相关人员,获得了许多成果。中国在机器人技术和无线传感器等方面有所作为,以此为突破口,不断缩小发达国家之间的差距,探索整个路线的规划、信息集成、自主导航、视觉反馈和一些智能机器人的基本技术,使其产生的重要成果能够灵活运用到各个领域。随着各项技巧的不断完善,出现了更加智能的机器人,使用方便,以不断提高人们的生活质量。
1.3基于无线通信的多传感器智能小车的技术特点
智能小车需要连接到实施无线通信的远程监控的计算机,并接受计算机反馈的运动状态信息和周围环境的状况,下达移动命令,这就是通过建立无线通信传感网络,执行小车与计算机的通信之间的无线连接的。为了提高计算机监控,信息反馈真实的智能小车的准确性,小车需要收集更多的运动信息和负载状态。在小车采集信息的过程中,需要使用多个传感器的数据融合技术,传感器数据融合提高了系统的可行性和互补性,减少系统冗余。多传感器信息融合技术主要作用于信息的融合、系统环境和建立传感器网络。传感器信息通过无线传感网络传输到系统的控制中心,从而执行计算机发送的运动控制命令,在出现智能差错时,只需要通过电脑实施远程监控来调节智能小车的运动。因此,智能小车系统采用了无线传输、远程监控、信息技术的集合,设计多传感器的移动小车。
1.4基于无线通信的多传感器智能小车课题研究的内容
本文的研究内容主要有三块:设计无线通信网络、设计智能小车的硬件、软件和设计多个传感器的融合。首先,用于无线通信的控制系统,发送和经由无线收发模块接收信息。按照通信协议进行数据传输,实现信息共享。为实时通信小车,协作可靠的系统要求,设计出适用于智能小车无线通信网络的多传感器。其次,主要介绍小车所选取的硬件和相关模块的功能,并且所选择的硬件模块的详细参数,包括硬件设计的单片机模块、红外避障模块、温湿度信息采集模块、电机及其驱动模块。根据相关的结构和功能,智能汽车可以设计能够模拟实际车辆硬件和软件系统。最后,采用多传感器进行信息采集,通过红外传感器来识别障碍物,对所处环境内的障碍物进行识别,可以调节感应距离,发回信号给控制中心,达到避障目的,到达指定地点后,通过温、湿度传感器等测量相关物质的温度、湿度等环境状况,将数据反馈到显示屏上。三个部分共同构造了远程监控系统和无线传输系统,实现了小车的远程控制功能和无线传输功能,从而达到了课题研究的要求。
参考文献
1.郑启文基于无线通信网络的多智能小车协作控制系统研究[D]
2.林建辉 基于多传感器的智能小车模型[R]
3.谢钦 基于无线传感器的智能车控制研究[D]
4.袁新娜 基于多传感器信息融合技术的智能小车避障系统研究[D]
5.张竞 基于多传感器信息融合的智能轮椅避障研究[D]
6.龚君、郑启文等 基于ZigBee多智能小车无线控制系统的设计[J]
7.郑启文、王川等 无线通信网络的多智能小车编队控制系统[J]