














苏ICP备112451047180号-6
基于Arduino的红外遥控智能小车设计
1.引言
1.1概述
本文主要介绍用Arduino和红外遥控知识设计智能小车。随着科技的发展,智能控制技术成为以后科技的主要发展方向,它按照预先设定的模式自动的运作,不需要人为的管理,可以用于科学勘探等领域。而智能遥控技术是指实现对被控目标的远程遥控控制,在航空航天、工业控制、家电领域应用十分广泛。红外遥控是一种非接触控制技术、无线、具有抗干扰能力强,功耗低,信息传输可靠,易实现,成本低等显著优点,被诸多电子设备广泛采用。
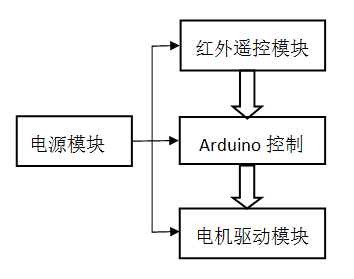
系统的主要控制模块是Arduino开发板,通过遥控器按键的按下,由遥控器发 送一组对应按键的红外编码。然后红外接收头接收这帧编码,红外接收头 的OUT引脚输出低电平时,单片机进入外部中断1,被解码后的数据送到单片机中,由单片机内部的程序来验证所收的数据是遥控器的哪个按键发出 的。然后通过数据对应的功能控制小车的前进、后退、加速、减速、左转 和右转的功能。
1.2原理
经过焊接、组装、调试等工作后红外智能小车成形。借助红外遥控器完成小车运动的整个过程,设计编程简单,容易理解掌握,且工作稳定可靠。总体电路简单,易于制作。智能小车红外遥控模块是一款基于Arduino的实验,通过红外接收头以及红外遥控器来控制小车的前进、后退、左右及停止。
2.设计内容及设计要求
设计内容:本设计将采用Arduino控制板为核心来进行控制遥控小车,选择通用、价廉的 Arduino 单片机为控制平台,选择比较常见的电机模型做为机械平台,通过细化设计要求,并且结合传感器技术和C 语言软件编程以及电机控制技术 相关知识实现小车的各种功能。红外接收头接受信号,制作一款智能小车。手动驾驶时,通过红外遥控器上的2、8、4、6、5按钮来控制小车的前进、后退、左转、右转、暂停功能。
设计要求:需要能掌握Arduino编程以及小车的连接,焊接,组装。
目 录
1.引言 1
1.1概述 1
1.2原理 1
2.设计内容及设计要求 1
3.试验器件清单 2
4.设计的系统方案 2
4.1系统总体框架 2
4.2系统设计方案 2
5.车体模块分析 3
5.1 Arduino控制板模块 3
5.2 电机驱动模块 3
5.3供电模块 4
5.4 红外遥控模块 4
5.5电路工作原理 5
6.设计的调试 5
7.总结设计电路的特点及方案的优缺点 6
7.1设计电路的特点 6
7.2方案优点 6
7.3方案缺点 6
参考文献 7
附 录 9
参考文献
[1] 曾伟.基于Arduino的红外遥控设计.南昌:南昌航空大学出版社,1998:163-167.
[2] 刘国钧,陈绍业.图书馆目录[M].北京:高等教育出版社,1957:15-18.
[3]王晶.智能小车运动控制技术研究.硕士说明书,武汉:武汉理工大学,2009 .