














苏ICP备112451047180号-6
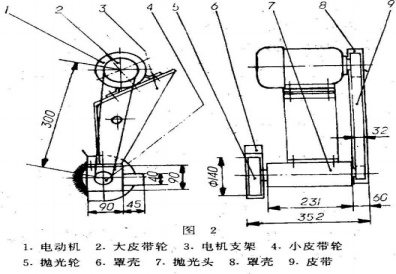
基于单片机螺纹抛光机控制系统设计
通过对减震器两端螺纹的抛光处理,可清除螺纹牙型中内部的夹渣,保证减震器在使用的过程中不会因为活塞杆螺纹与锁紧螺母之间的配合出现松动。这就保证了减震器在使用过程中减衰力不会降低,大大提高了产品的质量和性能,同时也增加了产品的使用寿命。用手动的方法进行抛光只能靠人为意识来保证效率,同时难以保证漏抛光或抛光不均匀现象不出现,并且需要增加专人操作,使劳务费增加从而造成生产成本增加。
现在自动控制技术广泛应用在螺纹抛光中,通过电磁阀控制气、液阻尼缸,对油缸进出油口节流阀的调整,可分别控制抛光头升降速度,利用气缸换向阀与油缸二位二通阀的联动,实现抛光轮准确停止在任意位置。机架上必须有顶丝对托架起到最底限位保护作用。根据工件的直径大小,调节顶丝的高低。电路上实现三个托架的独立升降控制,及快速切换功能,三个抛光轮单向旋转与停止的独立控制。在控制设计上,点动/ 调整和手动/联动是抛光机必不可少的基本控制方式。在抛光过程中完成输入信的循环扫描并在输入信息处理后,输出不同的信号制系统的各执行部件,使它们协调动作,完成螺纹抛光[6]。
内外螺纹抛光机控制工件的旋转及往复运动。设备的工件进给速度是通过改变无级变速电机的输出转速实现连续调整的。螺纹抛光轮转速因工件材质不同,一般推荐值为:碳钢31-51m/s。抛光轮的外径一般选为350mm,大了易产生振动,小了则达不到预定的线速度,抛不出效果。根据工件的表面粗糙度选用一定粒度的固定磨料抛光轮,工件进给速度要适宜,太慢容易烧伤工件表面且生产效率底,太快则在工件上产生螺旋纹,抛磨不均匀。工件运动时的直线度非常重要,一般要求调试抛光机时要达到工件运动时径向跳动小于0.1mm,直线度小于0.05mm/1000mm,否则,要调整两排导轮的间距,或修车导轮外圆[9]。内外螺纹抛光如图1.2.3所示。
内外螺纹抛光装置不会划痕零件,既进行抛光,有去毛刺和倒圆,有效提高螺纹精度;减少或消除工件表面应力;振动小噪声低;成本低,操作简单,易调整。
2 方案论证
2.1 系统工作原理
在本设备中使用的抛光工具为钢刷轮,其有大量的细钢丝组成,钢刷轮的旋转是由电机主轴直接带动。他们的联动是由各气压缸的动作来实现的,其动作顺序则是由单片机控制系统来实现的。在钢刷轮进行抛光前必须对各气压缸的行程进行调节,特别是上部的压紧气压缸和钢刷轮下方的定位气压缸的行程。各气压缸的行程通过电磁阀调节压力来实现。其中送料气压缸、定位气缸和压紧气压缸的时间差(2S)以及抛光时间(5S)由延时继电器控制,其延时的时间是通过实验来总结决定的。
在抛光加工时,工件的送入送出所需的动力由气压系统来提供,工件的转动所需的动力由小电机通过带传动来提供,钢刷轮的转动由电机直接提供。其工作原理是,传动电机先带动工件转动,然后抛光电机开始工作。工件则通过气压系统的动力和单片机控制电路的控制信号间断地送入送出并进行螺纹抛光加工[14]。
此次设计中,抛光电机为可调速伺服电动机,带动电机为伺服电机。抛光工具为钢刷,由抛光电机转子直接带动。各个气缸的上下限位行程由感应器感测信号,延时时间及定时时间的控制,传感器1、传感器2全部由单片机控制。工作时,工件转动动力、抛光动力由伺服电机提供,传送工件动力由气压缸提供。工人负责将工件合理的摆放到机床上等待加工,这实现了生产的机械化及自动化,不仅节省了人力、财力,同时提高了生产的效率跟质量。
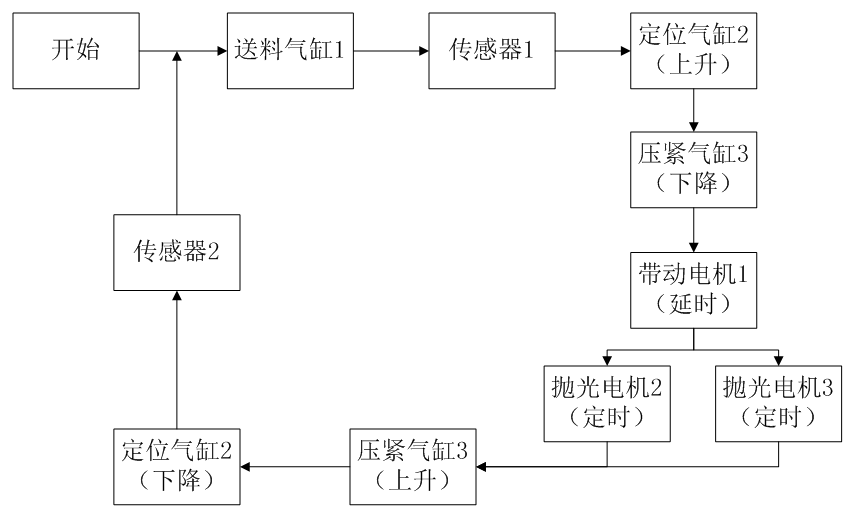
工作原理:按下启动按钮,即开始开关,送料气缸1开始上升,到达上限位后停止;当传感器1检测到有信号后,定位气缸2开始上升,同时送料气缸1下降到下限位并停止运动;气缸2到达上限位停止后,压紧气缸3开始下降,当到达下限位后停止;电机1启动,带动工件运动,同时延时定时器开始定时;当电机1达到一定转速时,延时结束,抛光电机2、3同时启动开始抛光,定时器开始分别计时;计时结束,抛光电机2、3停止运行,电机1停止运动;压紧气缸3开始上升,到达上限位后停止,同时定位气缸2开始下降;压紧气缸3运动到上限位后停止,气缸2下降,到达下限位后停止;当传感器2检测到有信号时,同时送料气缸1开始上升,工作循环开始。基本工作流程如图2.1所示。

方案二原理框图
2.2.3 方案三
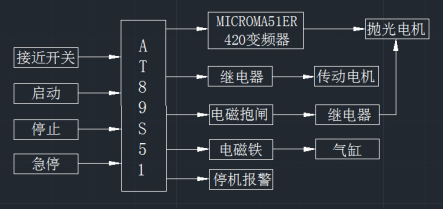
采用AT89S51单片机作为系统的核心处理单元,变频器型号为西门子的MICROMASTER 420,接收模拟信号来调节电机转速,抛光电机的制动通过电磁抱闸来实现,这种方案使用便捷、运行安全可靠、具有较强的抗干扰能力,可以实现高精度、高质量的抛光。方案原理框图如图2.4所示。
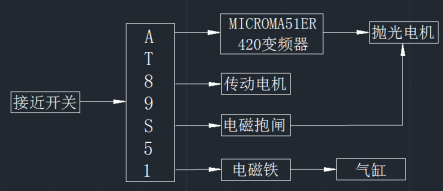
图2.4 方案三原理框图
2.3 总体方案
通过对系统主要模块所用元件的性能、精度、价格等多方面的综合比较,最后确定选用的方案完成螺纹抛光机控制系统设计。最终方案采用型号为AT89S51的单片机,变频器型号为西门子的MICROMASTER 420。在方案三的基础上加上低压控制电路、停机报警电路、电压显示模块、电流显示模块就形成了完善的系统框图如图2.5所示。
4 控制系统软件系统设计
4.1 系统的顺序功能设计
在本设备中使用的抛光工具为钢刷轮,其有大量的细钢丝组成,钢刷轮的旋转是由电机主轴直接带动。他们的联动是由各气压缸的动作来实现的,其动作顺序则是由单片机(可编程控制器)来实现的。在钢刷轮进行抛光前必须对各气压缸的行程进行调节,特别是上部的压紧气压缸和钢刷轮下方的顶紧定位气压缸的行程。各气压缸的行程通过电磁阀调节压力来实现。其中送料气压缸和定位气压缸的时间差(5S)以及抛光时间(3S)由延时继电器控制,其延时的时间是通过实验来总结决定的。
动作顺序:按下启动按钮,即开始开关,送料气缸1开始上升,到达上限位后停止;当传感器1检测到有信号后,定位气缸2开始上升,同时送料气缸1下降到下限位并停止运动;气缸2到达上限位停止后,压紧气缸3开始下降,当到达下限位后停止;电机1启动,带动工件运动,同时延时定时器开始定时;当电机1达到一定转速时,延时结束,抛光电机2、3同时启动开始抛光,定时器开始分别计时;计时结束,抛光电机2、3停止运行,电机1停止运动;压紧气缸3开始上升,到达上限位后停止,同时定位气缸2开始下降;压紧气缸3运动到上限位后停止,气缸2下降,到达下限位后停止;当传感器2检测到有信号时,同时送料气缸1开始上升,工作循环开始。
在抛光加工时,工件的送入送出所需的动力由气压系统来提供,工件的转动所需的动力由小电机通过带传动来提供,钢刷轮的转动由电机直接提供。其工作原理是,传动电机先带动工件转动,然后抛光电机开始工作。工件则通过气压系统的动力和单片机控制电路的控制信号间断地送入送出并进行螺纹抛光加工。
对于操纵系统的设计有两种方案,即用延时自动操纵和通过按钮手动操纵。这里的生产基本上趋近于一种自动化的生产模式,在生产过程中它的送料基本上都是采用自动送料机构完成的,而人只是负责在生产过程中将工件放在合适的工序位置的机床上进行加工罢了。对于ROD生产线(活塞杆加工)来讲亦是如此。因此,我们在设计时为了同时满足加工的自动化和生产节拍的要求,我们仍然采用自动送料、加工机构进行生产[18]。
4.2 系统软件设计原则
编制软件最基本的要求是:
1、软件结构清晰、简捷、流程合理;
2、各功能程序实现模块化。这样便于调试、连接,又便于移植、修改;
3、程序存储区,数据存储区规划合理,既节省空间,又便于操作;
4、运行状态实现标志化管理。各功能程序运行状态,运行结果及运行要求都设置了状态,便于查阅,程序的运行都可以通过状态标志来控制[14]。
控制系统设计要求是:
1、最大限度地满足被控对象的控制要求
充分发挥单片机的功能,最大限度地满足被控对象的控制要求,是设计单片机控制系统的首要前提,这也是设计中最重要的一条原则。同时要注意和现场的工程管理人员、工程技术人员、现场操作人员紧密配合,拟定控制方案,共同解决设计中的重点问题和疑难问题。
2、保证单片机控制系统安全可靠
保证单片机控制系统能够长期安全、可靠、稳定运行,是设计控制系统的重要原则。这就要求设计者在系统设计、元器件选择、软件编程上要全面考虑,以确保控制系统安全可靠。例如:应该保证单片机程序不仅在正常条件下运行,而且在非正常情况下(如突然掉电再上电、按钮按错等),也能正常工作。
3、力求简单、经济、使用及维修方便
一个新的控制工程固然能提高产品的质量和数量,带来巨大的经济效益和社会效益,但新工程的投入、技术的培训、设备的维护也将导致运行资金的增加。因此,在满足控制要求的前提下,一方面要注意不断地扩大工程的效益,另一方面也要注意不断地降低工程的成本。这就要求设计者不仅应该使控制系统简单、经济,而且要使控制系统的使用和维护方便、成本低,不宜盲目追求自动化和高指标。
4、适应发展的需要
由于技术的不断发展,控制系统的要求也将会不断地提高,设计时要适当考虑到今后控制系统发展和完善的需要[19]。
在设定抛光和送料的延时时间时,需要进行实验。因为本次设计是为了改变ROD生产中的一个品质问题,且ROD各工序的MT(制造时间)、CT(装夹时间)、DT(机器加工时间)早已作为技术改善指标测定过,故对延时时间确定的实验无需进行。由于磨床的DT为8.5秒(自动送料没有CT),故设定抛光时间为3秒,气缸2延时送料时间为5秒,再加上棒料在送料板和接料板上的滚动时间,抛光机的工作效率是可以满足磨床的加工效率的。
4.3 输入输出地址分配表
根据控制过程中气缸动作顺序及控制要求,对控制所需的外部设备设计如表4.1所示。
表4.1 输入输出地址分配表
4.4 系统流程图
流程图主要用来说明某一过程。这种过程既可以是生产线上的工艺流程,也可以是完成一项任务必需的管理过程。系统流程图如图4.1所示。
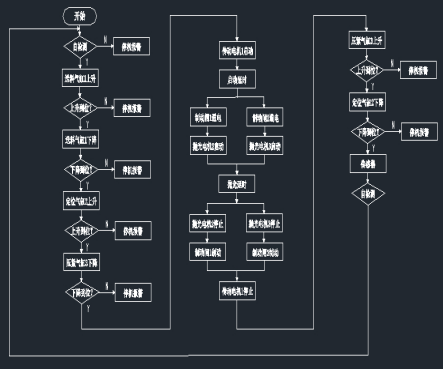
图4.1 系统流程图
4.5 程序设计
根据系统流程图设计编程程序,编程程序见附录。
5 总 结
5.1 结论
下面是我对整个毕业设计的过程做一下简单的总结。
1、接到任务以后进行选题。选题是毕业设计的开端,选择恰当的、感兴趣的题目。
2、题目确定后就是找资料了。查资料是做毕业设计的前期准备工作,到图书馆、书店、资料室去虽说是比较原始的方式,但也有可取之处的。总之,不管通过哪种方式查的资料都是有利用价值的,要一一记录下来以备后用。
3、通过上面的过程,已经积累了不少资料,对所选的题目也大概有了一些了解,这一步就是在这样一个基础上,综合已有的资料来更透彻的分析题目。
4、有了研究方向,就要动手实现。编写源代码的时候最好是编写一个小模块就进行调试,这样可以避免设计的最后出现太多的错误而乱成一团糟。一步步地做下去之后,你会发现要做出来并不难,只不过每每做一会儿会发现一处错误要修改,就这样在不断的修改调试,再修改再调试。
5、 写论文能提升以下几个方面的能力:
(1)文字表述:论文里的语言非常讲究,这方面需要继续加强。
(2)交流、讨论:文章的大致内容写完后,一定要和老师、其他同学多交流,让他们多提点建议。一些计量软件使用方法,可以向学长们请教。
(3)细心:模型公式编辑、标点符号、文章各段格式等,都需要细心。
(4)搜索:需要搜索很多资料,如何在短时间找到你想要得资料,得在搜索关键词上有所设置才行。一些好的统计数据网站,需要随时记录下来,以便日后继续使用。
我的心得也就这么多了,总之,这次毕业设计让我学习到很多。虽然结束了,但这只能是一个开始。今后作为技术员,要学习的规范,程序设计语言还有很多。在微型计算机控制领域,要学的实在太多,仅大学生涯所学实在有限。我们只有对自己有了更高的要求,才能作为动力不断取得新的成绩! 不管学会的还是学不会的的确觉得困难比较多,真是万事开头难,不知道如何入手。
5.2 进一步工作设想
针对本次基于单片机螺纹抛光机控制系统设计的目的,即用来抛光活塞杆两端的螺纹,使螺纹牙形内部没有铁屑等杂质,避免装配时产生虚假扭矩而影响装配精度,该设计已经能满足设计的需要。从该工序的上料到结束,基本上实现了自动化,包括工件的传送,夹紧,抛光等都是设备自动完成的。设备能通过调节砂轮的位移来适应加工不同长度的工件,也能通过调节汽缸活塞的行程来适应不同直径工件的加工。
设备加工的效率也能与整个生产线的节拍相适应。采用单片机控制还有一的优点,就是能在加工时间(CT)变化后,设备加工时间也能相继改变,这只须在单片机程序里把参数改一下就行。
该设备设计精度不高,所用零部件也大都是精度一般的标准件和通用件,也有少部分自制件。结构并不是很复杂,出现故障维修也方便。新的抛光方法又不断地被创造出来,各种半自动化、自动化产品在各种规模及各种类型的企业实验室得到广泛应用,使操作者的工作量得以减小,制样效率得到提高;以微处理器为基础的各种制样设备代表着螺纹抛光的先进技术通过机电结合软硬件结合及互补,增加柔性抛光功能等方式,改造传统的设备。
通过对减震器两端螺纹的抛光处理,可清除螺纹牙型中内部的夹渣,保证减震器在使用的过程中不会因为活塞杆螺纹与锁紧螺母之间的配合出现松动。这就保证了减震器在使用过程中减衰力不会降低,大大提高了产品的质量和性能,同时也增加了产品的使用寿命。用手动的方法进行抛光只能靠人为意识来保证效率,同时难以保证漏抛光或抛光不均匀现象不出现,并且需要增加专人操作,使劳务费增加从而造成生产成本增加。
现在自动控制技术广泛应用在螺纹抛光中,通过电磁阀控制气、液阻尼缸,对油缸进出油口节流阀的调整,可分别控制抛光头升降速度,利用气缸换向阀与油缸二位二通阀的联动,实现抛光轮准确停止在任意位置。机架上必须有顶丝对托架起到最底限位保护作用。根据工件的直径大小,调节顶丝的高低。电路上实现三个托架的独立升降控制,及快速切换功能,三个抛光轮单向旋转与停止的独立控制。在控制设计上,点动/ 调整和手动/联动是抛光机必不可少的基本控制方式。在抛光过程中完成输入信的循环扫描并在输入信息处理后,输出不同的信号制系统的各执行部件,使它们协调动作,完成螺纹抛光[6]。
内外螺纹抛光机控制工件的旋转及往复运动。设备的工件进给速度是通过改变无级变速电机的输出转速实现连续调整的。螺纹抛光轮转速因工件材质不同,一般推荐值为:碳钢31-51m/s。抛光轮的外径一般选为350mm,大了易产生振动,小了则达不到预定的线速度,抛不出效果。根据工件的表面粗糙度选用一定粒度的固定磨料抛光轮,工件进给速度要适宜,太慢容易烧伤工件表面且生产效率底,太快则在工件上产生螺旋纹,抛磨不均匀。工件运动时的直线度非常重要,一般要求调试抛光机时要达到工件运动时径向跳动小于0.1mm,直线度小于0.05mm/1000mm,否则,要调整两排导轮的间距,或修车导轮外圆[9]。内外螺纹抛光如图1.2.3所示。
内外螺纹抛光装置不会划痕零件,既进行抛光,有去毛刺和倒圆,有效提高螺纹精度;减少或消除工件表面应力;振动小噪声低;成本低,操作简单,易调整。
2 方案论证
2.1 系统工作原理
在本设备中使用的抛光工具为钢刷轮,其有大量的细钢丝组成,钢刷轮的旋转是由电机主轴直接带动。他们的联动是由各气压缸的动作来实现的,其动作顺序则是由单片机控制系统来实现的。在钢刷轮进行抛光前必须对各气压缸的行程进行调节,特别是上部的压紧气压缸和钢刷轮下方的定位气压缸的行程。各气压缸的行程通过电磁阀调节压力来实现。其中送料气压缸、定位气缸和压紧气压缸的时间差(2S)以及抛光时间(5S)由延时继电器控制,其延时的时间是通过实验来总结决定的。
在抛光加工时,工件的送入送出所需的动力由气压系统来提供,工件的转动所需的动力由小电机通过带传动来提供,钢刷轮的转动由电机直接提供。其工作原理是,传动电机先带动工件转动,然后抛光电机开始工作。工件则通过气压系统的动力和单片机控制电路的控制信号间断地送入送出并进行螺纹抛光加工[14]。
此次设计中,抛光电机为可调速伺服电动机,带动电机为伺服电机。抛光工具为钢刷,由抛光电机转子直接带动。各个气缸的上下限位行程由感应器感测信号,延时时间及定时时间的控制,传感器1、传感器2全部由单片机控制。工作时,工件转动动力、抛光动力由伺服电机提供,传送工件动力由气压缸提供。工人负责将工件合理的摆放到机床上等待加工,这实现了生产的机械化及自动化,不仅节省了人力、财力,同时提高了生产的效率跟质量。
工作原理:按下启动按钮,即开始开关,送料气缸1开始上升,到达上限位后停止;当传感器1检测到有信号后,定位气缸2开始上升,同时送料气缸1下降到下限位并停止运动;气缸2到达上限位停止后,压紧气缸3开始下降,当到达下限位后停止;电机1启动,带动工件运动,同时延时定时器开始定时;当电机1达到一定转速时,延时结束,抛光电机2、3同时启动开始抛光,定时器开始分别计时;计时结束,抛光电机2、3停止运行,电机1停止运动;压紧气缸3开始上升,到达上限位后停止,同时定位气缸2开始下降;压紧气缸3运动到上限位后停止,气缸2下降,到达下限位后停止;当传感器2检测到有信号时,同时送料气缸1开始上升,工作循环开始。基本工作流程如图2.1所示。
2.2 方案论证
系统的设计是指根据设计任务要求,对系统所需元件、设备参数进行必要的计算,通过认真研究、分析、比较后选定器件的型号,再将设备、元件通过可靠的接口电路联系起来构成一个完整的系统。在系统的整体方案确定后,首先要明确设计要求,然后对系统硬件、软件进行设计,其中包括绘制原理框图、电路原理图,对原理进行必要说明,综合考虑系统的性能和稳定性要求,以保证所设计的系统达到预期的要求。
通过查阅大量的文献资料、综合分析考虑以模块的方式提出几种可供选择的方案:
2.2.1 方案一
采用AT89S51单片机作为系统的核心处理单元,螺纹抛光电机用变速箱调速,不加变频器;制动时用反接制动,全部使用开关量信号控制,这种方案原理简单,但需反接制动对于电机的冲击较大,将降低抛光电机的寿命。需要增加专人操作,使劳务费增加而造成生产成本增加。方案原理框图如图2.2所示。
图2.2 方案一原理框图
2.2.2 方案二
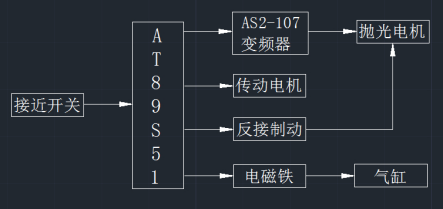
采用AT89S51单片机作为系统的核心处理单元,采用变频器的型号是AS2-107,用开关量来调节抛光电机速度;该方案电机制动方法是反接制动;但本方案稳定性差。方案原理框图如图2.3所示。
方案二原理框图
2.2.3 方案三
采用AT89S51单片机作为系统的核心处理单元,变频器型号为西门子的MICROMASTER 420,接收模拟信号来调节电机转速,抛光电机的制动通过电磁抱闸来实现,这种方案使用便捷、运行安全可靠、具有较强的抗干扰能力,可以实现高精度、高质量的抛光。方案原理框图如图2.4所示。
图2.4 方案三原理框图
2.3 总体方案
通过对系统主要模块所用元件的性能、精度、价格等多方面的综合比较,最后确定选用的方案完成螺纹抛光机控制系统设计。最终方案采用型号为AT89S51的单片机,变频器型号为西门子的MICROMASTER 420。在方案三的基础上加上低压控制电路、停机报警电路、电压显示模块、电流显示模块就形成了完善的系统框图如图2.5所示。
4 控制系统软件系统设计
4.1 系统的顺序功能设计
在本设备中使用的抛光工具为钢刷轮,其有大量的细钢丝组成,钢刷轮的旋转是由电机主轴直接带动。他们的联动是由各气压缸的动作来实现的,其动作顺序则是由单片机(可编程控制器)来实现的。在钢刷轮进行抛光前必须对各气压缸的行程进行调节,特别是上部的压紧气压缸和钢刷轮下方的顶紧定位气压缸的行程。各气压缸的行程通过电磁阀调节压力来实现。其中送料气压缸和定位气压缸的时间差(5S)以及抛光时间(3S)由延时继电器控制,其延时的时间是通过实验来总结决定的。
动作顺序:按下启动按钮,即开始开关,送料气缸1开始上升,到达上限位后停止;当传感器1检测到有信号后,定位气缸2开始上升,同时送料气缸1下降到下限位并停止运动;气缸2到达上限位停止后,压紧气缸3开始下降,当到达下限位后停止;电机1启动,带动工件运动,同时延时定时器开始定时;当电机1达到一定转速时,延时结束,抛光电机2、3同时启动开始抛光,定时器开始分别计时;计时结束,抛光电机2、3停止运行,电机1停止运动;压紧气缸3开始上升,到达上限位后停止,同时定位气缸2开始下降;压紧气缸3运动到上限位后停止,气缸2下降,到达下限位后停止;当传感器2检测到有信号时,同时送料气缸1开始上升,工作循环开始。
在抛光加工时,工件的送入送出所需的动力由气压系统来提供,工件的转动所需的动力由小电机通过带传动来提供,钢刷轮的转动由电机直接提供。其工作原理是,传动电机先带动工件转动,然后抛光电机开始工作。工件则通过气压系统的动力和单片机控制电路的控制信号间断地送入送出并进行螺纹抛光加工。
对于操纵系统的设计有两种方案,即用延时自动操纵和通过按钮手动操纵。这里的生产基本上趋近于一种自动化的生产模式,在生产过程中它的送料基本上都是采用自动送料机构完成的,而人只是负责在生产过程中将工件放在合适的工序位置的机床上进行加工罢了。对于ROD生产线(活塞杆加工)来讲亦是如此。因此,我们在设计时为了同时满足加工的自动化和生产节拍的要求,我们仍然采用自动送料、加工机构进行生产[18]。
4.2 系统软件设计原则
编制软件最基本的要求是:
1、软件结构清晰、简捷、流程合理;
2、各功能程序实现模块化。这样便于调试、连接,又便于移植、修改;
3、程序存储区,数据存储区规划合理,既节省空间,又便于操作;
4、运行状态实现标志化管理。各功能程序运行状态,运行结果及运行要求都设置了状态,便于查阅,程序的运行都可以通过状态标志来控制[14]。
控制系统设计要求是:
1、最大限度地满足被控对象的控制要求
充分发挥单片机的功能,最大限度地满足被控对象的控制要求,是设计单片机控制系统的首要前提,这也是设计中最重要的一条原则。同时要注意和现场的工程管理人员、工程技术人员、现场操作人员紧密配合,拟定控制方案,共同解决设计中的重点问题和疑难问题。
2、保证单片机控制系统安全可靠
保证单片机控制系统能够长期安全、可靠、稳定运行,是设计控制系统的重要原则。这就要求设计者在系统设计、元器件选择、软件编程上要全面考虑,以确保控制系统安全可靠。例如:应该保证单片机程序不仅在正常条件下运行,而且在非正常情况下(如突然掉电再上电、按钮按错等),也能正常工作。
3、力求简单、经济、使用及维修方便
一个新的控制工程固然能提高产品的质量和数量,带来巨大的经济效益和社会效益,但新工程的投入、技术的培训、设备的维护也将导致运行资金的增加。因此,在满足控制要求的前提下,一方面要注意不断地扩大工程的效益,另一方面也要注意不断地降低工程的成本。这就要求设计者不仅应该使控制系统简单、经济,而且要使控制系统的使用和维护方便、成本低,不宜盲目追求自动化和高指标。
4、适应发展的需要
由于技术的不断发展,控制系统的要求也将会不断地提高,设计时要适当考虑到今后控制系统发展和完善的需要[19]。
在设定抛光和送料的延时时间时,需要进行实验。因为本次设计是为了改变ROD生产中的一个品质问题,且ROD各工序的MT(制造时间)、CT(装夹时间)、DT(机器加工时间)早已作为技术改善指标测定过,故对延时时间确定的实验无需进行。由于磨床的DT为8.5秒(自动送料没有CT),故设定抛光时间为3秒,气缸2延时送料时间为5秒,再加上棒料在送料板和接料板上的滚动时间,抛光机的工作效率是可以满足磨床的加工效率的。
4.3 输入输出地址分配表
根据控制过程中气缸动作顺序及控制要求,对控制所需的外部设备设计如表4.1所示。
表4.1 输入输出地址分配表
| 控制信号 | 信号名称 | 元件名称 | 元件符号 | 地址端口 |
|
输 入 信 号 |
送料气缸1伸出信号 | 接近开关 | SB11 | P1.0 |
| 送料气缸1缩回信号 | 接近开关 | SB22 | P1.1 | |
| 下夹紧缸2缩回信号 | 接近开关 | SB33 | P1.2 | |
| 下夹紧缸2伸出信号 | 接近开关 | SB44 | P1.3 | |
| 上夹紧缸3伸出信号 | 接近开关 | SB55 | P1.4 | |
| 上夹紧缸3缩回信号 | 接近开关 | SB66 | P1.5 | |
| 单片机启动信号 | 按钮开关 | SB | INT0 | |
|
输 出 信 号 |
送料气缸1动作信号 | 电磁阀 | YA1 | P0.4 |
| 定位紧缸2动作信号 | 电磁阀 | YA2 | P0.5 | |
| 压紧紧缸3动作信号 | 电磁阀 | YA3 | P0.6 | |
| 传动电机信号 | 中间继电器 | KA1 | P0.0 | |
| 抛光电机1启动信号 | 中间继电器 | KA3 | P0.1 | |
| 抛光电机2启动电机 | 中间继电器 | KA4 | P0.2 | |
| 报警信号 | 指示灯 | HL | P0.7 |
流程图主要用来说明某一过程。这种过程既可以是生产线上的工艺流程,也可以是完成一项任务必需的管理过程。系统流程图如图4.1所示。
图4.1 系统流程图
4.5 程序设计
根据系统流程图设计编程程序,编程程序见附录。
5 总 结
5.1 结论
下面是我对整个毕业设计的过程做一下简单的总结。
1、接到任务以后进行选题。选题是毕业设计的开端,选择恰当的、感兴趣的题目。
2、题目确定后就是找资料了。查资料是做毕业设计的前期准备工作,到图书馆、书店、资料室去虽说是比较原始的方式,但也有可取之处的。总之,不管通过哪种方式查的资料都是有利用价值的,要一一记录下来以备后用。
3、通过上面的过程,已经积累了不少资料,对所选的题目也大概有了一些了解,这一步就是在这样一个基础上,综合已有的资料来更透彻的分析题目。
4、有了研究方向,就要动手实现。编写源代码的时候最好是编写一个小模块就进行调试,这样可以避免设计的最后出现太多的错误而乱成一团糟。一步步地做下去之后,你会发现要做出来并不难,只不过每每做一会儿会发现一处错误要修改,就这样在不断的修改调试,再修改再调试。
5、 写论文能提升以下几个方面的能力:
(1)文字表述:论文里的语言非常讲究,这方面需要继续加强。
(2)交流、讨论:文章的大致内容写完后,一定要和老师、其他同学多交流,让他们多提点建议。一些计量软件使用方法,可以向学长们请教。
(3)细心:模型公式编辑、标点符号、文章各段格式等,都需要细心。
(4)搜索:需要搜索很多资料,如何在短时间找到你想要得资料,得在搜索关键词上有所设置才行。一些好的统计数据网站,需要随时记录下来,以便日后继续使用。
我的心得也就这么多了,总之,这次毕业设计让我学习到很多。虽然结束了,但这只能是一个开始。今后作为技术员,要学习的规范,程序设计语言还有很多。在微型计算机控制领域,要学的实在太多,仅大学生涯所学实在有限。我们只有对自己有了更高的要求,才能作为动力不断取得新的成绩! 不管学会的还是学不会的的确觉得困难比较多,真是万事开头难,不知道如何入手。
5.2 进一步工作设想
针对本次基于单片机螺纹抛光机控制系统设计的目的,即用来抛光活塞杆两端的螺纹,使螺纹牙形内部没有铁屑等杂质,避免装配时产生虚假扭矩而影响装配精度,该设计已经能满足设计的需要。从该工序的上料到结束,基本上实现了自动化,包括工件的传送,夹紧,抛光等都是设备自动完成的。设备能通过调节砂轮的位移来适应加工不同长度的工件,也能通过调节汽缸活塞的行程来适应不同直径工件的加工。
设备加工的效率也能与整个生产线的节拍相适应。采用单片机控制还有一的优点,就是能在加工时间(CT)变化后,设备加工时间也能相继改变,这只须在单片机程序里把参数改一下就行。
该设备设计精度不高,所用零部件也大都是精度一般的标准件和通用件,也有少部分自制件。结构并不是很复杂,出现故障维修也方便。新的抛光方法又不断地被创造出来,各种半自动化、自动化产品在各种规模及各种类型的企业实验室得到广泛应用,使操作者的工作量得以减小,制样效率得到提高;以微处理器为基础的各种制样设备代表着螺纹抛光的先进技术通过机电结合软硬件结合及互补,增加柔性抛光功能等方式,改造传统的设备。
目录
1 绪 论 3
1.1 课题的提出与意义 3
1.2.1 国内螺纹抛光机的性能与特点 4
1.2.2 国外螺纹抛光机的性能与特点 7
1.3 国内外螺纹抛光机性能比较 7
1.3.1 总体方案比较 7
1.3.2 控制方案比较 7
2 方案论证 8
2.1 系统工作原理 8
2.2 方案论证 9
2.2.1 方案一 9
2.2.2 方案二 10
2.2.3 方案三 10
2.3 总体方案 11
3控制系统硬件系统设计 12
3.1 系统总体结构 12
3.1 单片机概述及选型 12
3.1.1 单片机组成及基本结构 12
3.1.2 AT89S51单片机简介 12
3.1.3 单片机最小系统 13
3.1.4 时钟电路 14
3.1.5 复位电路 14
3.1.6 看门狗电路 15
3.2 单片机控制接线图 15
3.3 变频器选型 16
3.4 红外线传感器选型 19
3.5 气缸控制系统设计 19
3.6 主电路设计 20
3.7 控制电路设计 21
4 控制系统软件系统设计 23
4.1 系统的顺序功能设计 23
4.2 系统软件设计原则 24
4.3 输入输出地址分配表 25
4.4 系统流程图 25
4.5 程序设计 26
5 总 结 27
5.1 结论 27
5.2 进一步工作设想 28
致 谢 29
附 录 32
参考文献
[1] 安维胜等.现代机电设备[M].北京:电子工业出版社,2008.9.P,l-6.
[2] 夏志平,王细洋,杜华荣.数控抛光机系统的设计及实现.《机械工程师》,2013(12).
[3] 中国机床工具工业协会磨床分会.中国数控研磨抛光机市场展望,《精密制造与自动化》,2013(1).
[4] 吴中俊主编.可编程控制器原理及应用[M]. 北京:机械工业出版社,2004.28-29.
[5] 张键华主编.精密与特种加工技术.北京:北京机械工业出版社,2003,7.
[6] 王会强,孙维连,杨钰瑛.抛光机的机械设计与研究[期刊论文].机械与电子,2005:25-28 .
[7] 罗宇航流.行PLC实用程序及设计[M]. 西安:西安电子科技大学出版社,2006.271.
[8] 陈文娟,孙维连,杨钰瑛,贾亚雷,李杰.抛光机自动控制系统的研究[期刊论文],现代机械2003.
[9] 河北农业大学机电新技术公司.DMP—3A10型抛光机 使用说明书[Z].河北农业大学机电新技术公司,1999.
[10] 陈文娟.抛光机的机械设计与控制系统的研究[D]. 河北农业大学,2003,8.
[11] 王阳光,中群太,徐天奇.基于PLC直流调速装置的设计[学位论文].电工技术,2005.
[12] 李娟,白雪峰.PLC控制的数字直流凋速器.电子与自动化.2000,6.
[13] 张毅刚.MCS—51单片机应用设计[M].北京:哈尔滨工业大学出版社,1997.
[14] 安维胜等.现代机电设备[M].北京:电子工业出版社[学位论文],2008,9.l-6.
[15] 贾静蕾.抛光机自动控制系统的设计与实现[学位论文],2008.
[16] 姜培刚,盖玉先主编机电一体化设计.机械工业出版社,2003,9.
[17] 杨丽珍,钟少猿,张晓冬,刘宏伟.新型双作用抛光机的设计与应用.《冶金设备》,2011(Z1).
[18] 安静.全自动抛光机电气控制系统设计.《机械研究与应用》,2013(6).
[19] Wang Wenjiang, Sun Huilai, Lin Shuzhong, Chen Jun, "Failure Prediction and Intelligent Troubleshooting in the Application of the Coin Cell Production Line",IJACT,Vol.4,No.6PP.149—156,2012.
[20] Miola,E.J.;Souza,S.D.;Dionysio,M.O.;Spinelli,D.;Soares,M.R.Fhardness profile of plasma nitrided H12 too]stee1.Materials Science and Engineering A256.;Vasconcellos,M.A.Z.;Santos,C.A.dos.(1998).Near·surface compositions and micro,60458.
[21] RA Jones and WJ Rupp.Rapid optical fabrication with CCOS[J].SPIE,1333,34-43(1990).