














��ICP��112451047180��-6
ˮ����ɰ��е��ϵͳ���
ժҪ
���ڹ�ҵ�Զ����̶ȵIJ�����ߣ���ҵ�ֳ��ĺܶ���ȼ���ױ��ȸ�Σ���������Ͷ����Ͻ��ɻ����˴��档��һ������Լ��Ṥ�˵��Ͷ�ǿ�ȣ���һ������Դ������Ͷ�����Ч�ʡ����磬���������������ڼ���������ճɰ���������������ϣ���ʱ����Ҫ������ǹ����ճɰ�����������ų��ڵĴ�����ɰ�����������г����������Σ�Ϊ�˽����������εķ����ʣ�ˮ����ɰ��ˮ����ɰ�ȹ��վͳ��������о�����֮�С�
��������һ���������Ͻ�Ϊ���ܵ�ʵ������Ŀ�����ж�PLC��Ӧ�á���е�ṹ����ơ����Ʒ�����ѡ��ȷ�������˱�Ҫ��̽�֡�����ܽ���ȫ�ģ�ָ���˻�е�ֵĸĽ���ʩ��Ӧ��ǰ���ͷ�չ����
�ؼ��֣���е�֣�Һѹ������PLC���ɱ�̿�������
Abstract
With the improvement of the industrial automation, industrial site a lot of flammable, explosive and other high risk of heavy physical labour will be replaced by robots. This can reduce the labor intensity of workers, on the other hand can greatly improve labor productivity. For example, the generated during zhugongzhugong workshop sand residues on the surface of the casting, then you need to use the gun sand cleaning. As long engaged in cleaning operation, founder pneumoconiosis workers, in order to reduce the founder pneumoconiosis incidence in water blast cleaning, sand and water cleaning process on the research topic.
This topic is a machine, combined with practical projects more closely, in this paper, the application of PLC, the design of mechanical structure, control methods and other aspects of the necessary study. Finally, summarized the full text, points out the improvement measures, manipulator application prospect and development direction.
Keywords: hydraulic drive manipulator,, PLC (programmable logic controller)
����
���������һ��ˮ����ɰ��е�֡�������Ƶ���Ҫ��������ɻ�е�ֽṹ��ƣ�Һѹϵͳ����Լ���PLC����ϵͳ�������ƣ���Ҫ����������
��1��ͨ�������й����ϣ������˹���������ˣ���е�֣�����ʷ����չ�ſ���������Ŀǰ�����˵ļ��ַ�����ʽ���оٳ����������������Ϻ߿Ƽ������м��ֳ����Ļ����ˡ�
��2�����ݱ�����ĸ��������ݣ�����˲��������ɶȻ�е�ֵķ�����������������֤��֤�������ֽṹ�Ŀ������㹤��Ҫ��
��3���Ի�е�ֵ������������ؽ��м��㣬����Һѹ�������ص��ʵ�ʹ�����Ҫ���������Һѹ�����ķ�������ͨ���Ƚϡ����ţ�֤������������������ѵġ�
��4������ʵ�ʵĹ���Ҫ��ѡȡ���˵�ҺѹԪ�����������У�ˣ�����ȷ������ҺѹԪ���ijߴ硢���ϵȣ��������˸���Ҫ�����Ļ�е�ṹͼ��
��5������ʵ�ʹ����������Ի�е�ֶ������й滮������е�ֶ������Ϊ˳������������PLC��ʵ�ֶ�����п��ƣ�ʹϵͳ���㲻ͬ���������µ���Ҫ��
�����
[1] �����.��ҵ���������ü���[M].��������ѧ������.2008-7.7��11��15��19��26��30��40��44��45��51��68��79��84��91
[2] ԭ��.��ҵ�����˷�չ��״������[J].�����Զ���.2007.��1��.34��38
[3] ���������˳���.�����������ߵĹ�ҵ�������о�[J].�Ƽ����µ���.2008.��27��.59-61
[4] �ޭZ���Կ˶�����������Ԭ��.��ҵ�����˵Ŀ��Ʋ���̽��[J]��������Һѹ.2008-10.��10��.95��100
[5] ���¾ۣ��ܻ��ڣ���ѩ.�̿�ͨ�û��������[J].Һѹ������.2007.��2��.63��64
[6] ������.ˮ����ɰ��е�ֵ��о������[D].�人�����пƼ���ѧ.2007
[7] �����.��ҵ��е�˼���[M].�������������ӿƼ���ѧ.2006.5
[8] ��С��.��ҵ��е�ֵ�PLC����[J].���繤�̼���.2004.��9��.32��36
[9] �����ᣬ��Ң��.Һѹ����ѹ����[M].��������е��ҵ������.2007-10
[10] �ɴ���.��е����ֲ�Һѹ����[S]����4��.��������ѧ��ҵ��.2007-9
[11] ��е����ֲ��ί��.��е����ֲ�Һѹ���������[S]����4��.��������е��ҵ������.2007-7
[12] ����־����꿡.����������ɱ���������[S].��������ѧ��ҵ������.2009-1.120
[13] ��������ҵ��ѧ������ѧ������.������ѧ[S]����6��.�������ߵȽ���������.2007-4.109��170��177
[14] ������.������ѧ[S]����4��.�������ߵȽ���������.2008-12.12-25,29-37
[15] �ﻸ������ģ�����Ľ�.��еԭ��[S]����7��.�������ߵȽ���������.2007-12.5��18��263��273
[16] ëƽ�������������������[S].��������е��ҵ������.2008-1
[17] Fathi Ghorbel, John Y. Hung, and Mark W. Spong. Adaptive Control of Flexible-Joint Manipulators. IEEE Control Systems Magazine, 1989.10, 9-13
[18] D. Black. A Modular Approach to Robotic Automation of DOE Applications. ARM Automation,Inc 2000.7

ժҪ
���ڹ�ҵ�Զ����̶ȵIJ�����ߣ���ҵ�ֳ��ĺܶ���ȼ���ױ��ȸ�Σ���������Ͷ����Ͻ��ɻ����˴��档��һ������Լ��Ṥ�˵��Ͷ�ǿ�ȣ���һ������Դ������Ͷ�����Ч�ʡ����磬���������������ڼ���������ճɰ���������������ϣ���ʱ����Ҫ������ǹ����ճɰ�����������ų��ڵĴ�����ɰ�����������г����������Σ�Ϊ�˽����������εķ����ʣ�ˮ����ɰ��ˮ����ɰ�ȹ��վͳ��������о�����֮�С�
��������һ���������Ͻ�Ϊ���ܵ�ʵ������Ŀ�����ж�PLC��Ӧ�á���е�ṹ����ơ����Ʒ�����ѡ��ȷ�������˱�Ҫ��̽�֡�����ܽ���ȫ�ģ�ָ���˻�е�ֵĸĽ���ʩ��Ӧ��ǰ���ͷ�չ����
�ؼ��֣���е�֣�Һѹ������PLC���ɱ�̿�������
Abstract
With the improvement of the industrial automation, industrial site a lot of flammable, explosive and other high risk of heavy physical labour will be replaced by robots. This can reduce the labor intensity of workers, on the other hand can greatly improve labor productivity. For example, the generated during zhugongzhugong workshop sand residues on the surface of the casting, then you need to use the gun sand cleaning. As long engaged in cleaning operation, founder pneumoconiosis workers, in order to reduce the founder pneumoconiosis incidence in water blast cleaning, sand and water cleaning process on the research topic.
This topic is a machine, combined with practical projects more closely, in this paper, the application of PLC, the design of mechanical structure, control methods and other aspects of the necessary study. Finally, summarized the full text, points out the improvement measures, manipulator application prospect and development direction.
Keywords: hydraulic drive manipulator,, PLC (programmable logic controller)
Ŀ¼
ժҪ I
Abstract I
��1�� ���� - 1 -
1.1 ѡ��ı��������� - 1 -
1.2 �������о���״�ͷ�չ������ - 1 -
1.3 ������о�����Ҫ���� - 3 -
��2�� ����������� - 5 -
2.1 ��е�ֵ���ɼ������ֹ�ϵ���� - 5 -
2.2 ��е�ֵ���Ʒ��� - 5 -
2.2.1 ��Ƶ�Ҫ�� - 5 -
2.2.2 ������Ʒ��� - 5 -
2.2.3 ���巽���ⶨ - 7 -
��3�� ��е�ֽṹ����Ʒ��� - 9 -
3.1 ĩ�˲���������Ʒ��� - 9 -
3.2 �������Ʒ��� - 9 -
3.3 �ֱ۵���Ʒ��� - 9 -
3.4 �����ͻ�������Ʒ��� - 10 -
��4�� ��е�ָ��������غɼ��� - 12 -
4.1 ���Ҫ����� - 12 -
4.2 �ֱ����������غɵļ��� - 12 -
4.3 �ֱ۸��������غɵļ��� - 13 -
4.4 �����ڶ������غ����صļ��� - 13 -
4.5 ��ѡϵͳ����ѹ�� - 14 -
��5�� ��е�ָ������ߴ���㼰У�� - 16 -
5.1 �����׳ߴ��ȷ�� - 16 -
5.2 �ֱ����������ṹ�ߴ��ȷ�� - 19 -
5.3 �ֱ۸��������ṹ�ߴ��ȷ�� - 19 -
5.4 �����ڶ�������ȷ�� - 19 -
5.5 ǿ��У�� - 19 -
5.6 �����ȶ���У�� - 20 -
��6�� Һѹϵͳ����� - 22 -
6.1 �ƶ������ķ��� - 22 -
6.1.1 ϵͳ������·ѡ�� - 22 -
6.2 ��ҺѹԪ��ѡ�� - 22 -
6.2.1 Һѹ�õ�ѡ�� - 22 -
6.2.2 Һѹ�����������ʵ�ѡ�� - 24 -
6.2.3 Һѹ����ȷ�� - 24 -
6.2.4 Һѹ����Ԫ����ѡ��ԭ�� - 25 -
6.2.5 ����������˵�� - 27 -
6.2.6 Һѹԭ��ͼ - 27 -
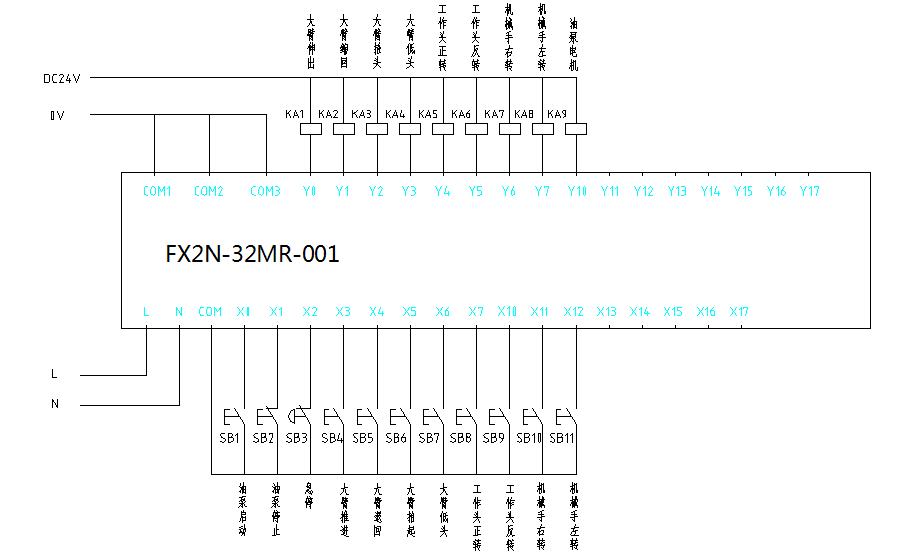
��7�� PLC����ϵͳ��� - 29 -
7.1 PLC����ϵͳ�ṹ����� - 29 -
7.2 PLCѡ�� - 29 -
7.3 ����Ӳ����ѡ�� - 29 -
7.4 PLC I/0�ķ����������ͼ - 31 -
7.5 ��������ͼ����س��� - 32 -
���� - 35 -
����� - 36 -
��¼ - 37 -
��1�� ����
1.1 ѡ�ⱳ����������
���ڹ�ҵ�Զ����̶ȵIJ�����ߣ���ҵ�ֳ��ĺܶ���ȼ���ױ��ȸ�Σ���������Ͷ����Ͻ��ɻ����˴��档��һ������Լ��Ṥ�˵��Ͷ�ǿ�ȣ���һ������Դ������Ͷ������ʡ����磬���������������ڼ���������ճɰ���������������ϣ���ʱ����Ҫ������ǹ����ճɰ�����������ų��ڵĴ�����ɰ�����������г����������Σ�Ϊ�˽����������εķ����ʣ�ˮ����ɰ��ˮ����ɰ�ȹ��վͳ��������о�����֮�С�
�û�е��������������ˮ����ɰ��������������״�ͳߴ粻ͬ��Ӧ�����IJ�λ�仯�ϴ�Ҫ���е����һ����ͨ���ԡ���е�����ٳֵ�ˮ����ǹ����ģ�����ֲ���ʱ�Ķ������ֱ���ʵ��ǰ�����������˶���
ͨ�������⣬��ѧ���ڱ�ҵ��ƹ������ۺϴ�ѧ��ѧ�����γ̼�רҵ�γ̣�����ѧ���ۺ�Ӧ����ѧ֪ʶ�ͼ���ȥ�����ͽ��һ�㹤�̼����������������һ������ѧ���������⡢�����Եؽ��ʵ�������������
��������ˮ����ɰ��е��ϵͳ��Ҫ����Һѹ������
��1�� ����
1.1 ѡ�ⱳ����������
���ڹ�ҵ�Զ����̶ȵIJ�����ߣ���ҵ�ֳ��ĺܶ���ȼ���ױ��ȸ�Σ���������Ͷ����Ͻ��ɻ����˴��档��һ������Լ��Ṥ�˵��Ͷ�ǿ�ȣ���һ������Դ������Ͷ������ʡ����磬���������������ڼ���������ճɰ���������������ϣ���ʱ����Ҫ������ǹ����ճɰ�����������ų��ڵĴ�����ɰ�����������г����������Σ�Ϊ�˽����������εķ����ʣ�ˮ����ɰ��ˮ����ɰ�ȹ��վͳ��������о�����֮�С�
�û�е��������������ˮ����ɰ��������������״�ͳߴ粻ͬ��Ӧ�����IJ�λ�仯�ϴ�Ҫ���е����һ����ͨ���ԡ���е�����ٳֵ�ˮ����ǹ����ģ�����ֲ���ʱ�Ķ������ֱ���ʵ��ǰ�����������˶���
ͨ�������⣬��ѧ���ڱ�ҵ��ƹ������ۺϴ�ѧ��ѧ�����γ̼�רҵ�γ̣�����ѧ���ۺ�Ӧ����ѧ֪ʶ�ͼ���ȥ�����ͽ��һ�㹤�̼����������������һ������ѧ���������⡢�����Եؽ��ʵ�������������
��������ˮ����ɰ��е��ϵͳ��Ҫ����Һѹ������
����
���������һ��ˮ����ɰ��е�֡�������Ƶ���Ҫ��������ɻ�е�ֽṹ��ƣ�Һѹϵͳ����Լ���PLC����ϵͳ�������ƣ���Ҫ����������
��1��ͨ�������й����ϣ������˹���������ˣ���е�֣�����ʷ����չ�ſ���������Ŀǰ�����˵ļ��ַ�����ʽ���оٳ����������������Ϻ߿Ƽ������м��ֳ����Ļ����ˡ�
��2�����ݱ�����ĸ��������ݣ�����˲��������ɶȻ�е�ֵķ�����������������֤��֤�������ֽṹ�Ŀ������㹤��Ҫ��
��3���Ի�е�ֵ������������ؽ��м��㣬����Һѹ�������ص��ʵ�ʹ�����Ҫ���������Һѹ�����ķ�������ͨ���Ƚϡ����ţ�֤������������������ѵġ�
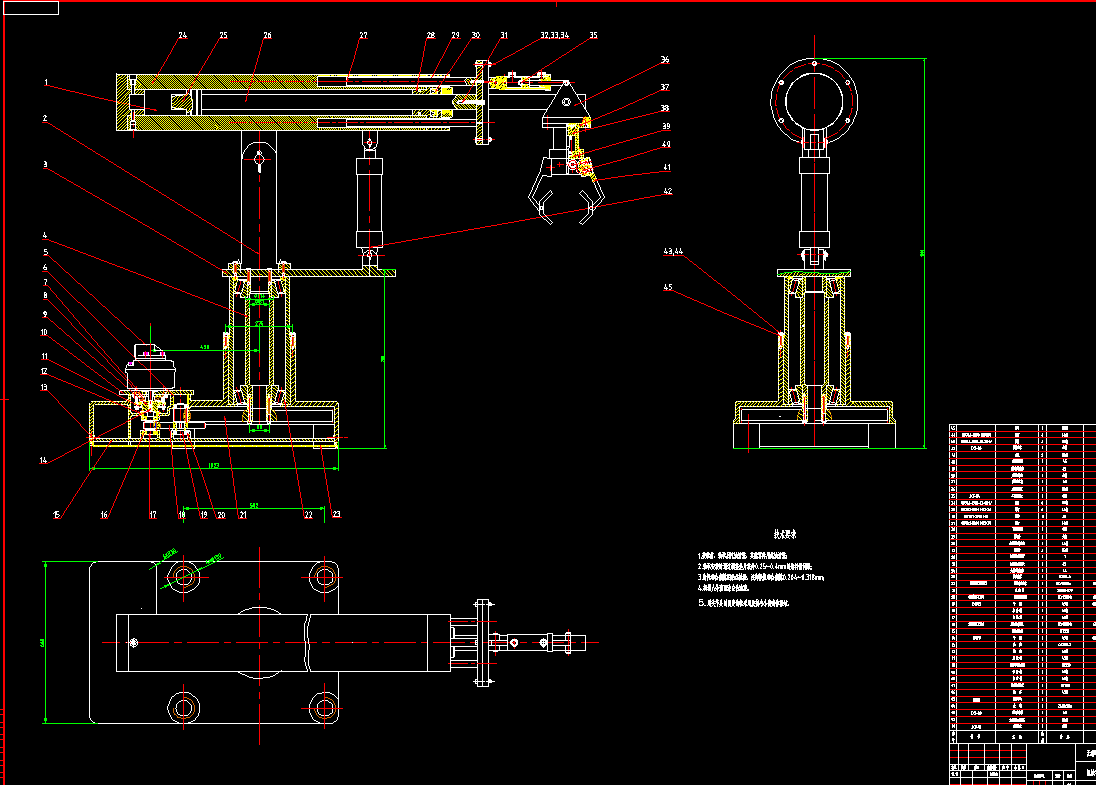
��4������ʵ�ʵĹ���Ҫ��ѡȡ���˵�ҺѹԪ�����������У�ˣ�����ȷ������ҺѹԪ���ijߴ硢���ϵȣ��������˸���Ҫ�����Ļ�е�ṹͼ��
��5������ʵ�ʹ����������Ի�е�ֶ������й滮������е�ֶ������Ϊ˳������������PLC��ʵ�ֶ�����п��ƣ�ʹϵͳ���㲻ͬ���������µ���Ҫ��
�����
[1] �����.��ҵ���������ü���[M].��������ѧ������.2008-7.7��11��15��19��26��30��40��44��45��51��68��79��84��91
[2] ԭ��.��ҵ�����˷�չ��״������[J].�����Զ���.2007.��1��.34��38
[3] ���������˳���.�����������ߵĹ�ҵ�������о�[J].�Ƽ����µ���.2008.��27��.59-61
[4] �ޭZ���Կ˶�����������Ԭ��.��ҵ�����˵Ŀ��Ʋ���̽��[J]��������Һѹ.2008-10.��10��.95��100
[5] ���¾ۣ��ܻ��ڣ���ѩ.�̿�ͨ�û��������[J].Һѹ������.2007.��2��.63��64
[6] ������.ˮ����ɰ��е�ֵ��о������[D].�人�����пƼ���ѧ.2007
[7] �����.��ҵ��е�˼���[M].�������������ӿƼ���ѧ.2006.5
[8] ��С��.��ҵ��е�ֵ�PLC����[J].���繤�̼���.2004.��9��.32��36
[9] �����ᣬ��Ң��.Һѹ����ѹ����[M].��������е��ҵ������.2007-10
[10] �ɴ���.��е����ֲ�Һѹ����[S]����4��.��������ѧ��ҵ��.2007-9
[11] ��е����ֲ��ί��.��е����ֲ�Һѹ���������[S]����4��.��������е��ҵ������.2007-7
[12] ����־����꿡.����������ɱ���������[S].��������ѧ��ҵ������.2009-1.120
[13] ��������ҵ��ѧ������ѧ������.������ѧ[S]����6��.�������ߵȽ���������.2007-4.109��170��177
[14] ������.������ѧ[S]����4��.�������ߵȽ���������.2008-12.12-25,29-37
[15] �ﻸ������ģ�����Ľ�.��еԭ��[S]����7��.�������ߵȽ���������.2007-12.5��18��263��273
[16] ëƽ�������������������[S].��������е��ҵ������.2008-1
[17] Fathi Ghorbel, John Y. Hung, and Mark W. Spong. Adaptive Control of Flexible-Joint Manipulators. IEEE Control Systems Magazine, 1989.10, 9-13
[18] D. Black. A Modular Approach to Robotic Automation of DOE Applications. ARM Automation,Inc 2000.7