
苏ICP备112451047180号-6
摘要
弦支拱顶结构是一种结合单层网壳和形成张拉整体系统的新型的预应力空间网格结构。对于较低的柔性索杆体系,形式分析对弦支拱顶结构力学性能至关重要。本文开发了一种针对弦支拱顶结构的预紧过程中影响结构新的形态的分析方法。首先对弦支拱顶结构形式分析的定义进行阐述,然后,为了形式分析提出一种迭代方法,为了模拟预紧过程提出一种连续的分析方法。通过结合这两种方法,形成了一种针对弦支拱顶结构的考虑预应力的分析方法。两个例子验证所提出的方法。数例结果表明节点坐标和索力误差均能稳定收敛到集合公差。根据预定的预紧方案,形式分析结果能准确达到预期初始状态。工程实例表明在不考虑预紧过程的影响下,形式分析是错误,最终所有索严重偏离预期的初始状态。然而,这可以通过本文提出的方法准确实现。
关键词:钢结构,弦支拱顶,形式分析,张拉过程,迭代法
一、简介
预应力网架结构是一种将预应力技术引入传统空间网格结构的新型结构。它已被广泛应用到许多大跨度的公共建筑如大型体育馆,展览中心和候车大厅。弦支拱顶结构是一种结合单层网壳和形成张拉整体系统的新型的预应力空间网格结构。近年来,它应用在一些大型的工程结构,如日本Hikarigaoka Dome和中国北京奥林匹克羽毛球体育场。
一个典型的弦支拱顶结构由单层网壳和下部索杆系统组成,如图1所示。单层网壳由许多不同的方向上的刚性杆组成,具有一定的刚度承载力。下部索杆系统是由环形缆绳、径向缆绳和垂直支柱组成的柔性系统。预应力可通过拉紧缆绳或调整支柱长度被引入柔性系统,通过这种方式,较低的索杆系统可以提供有效的弹性支持单层网壳,使内力分布改善,结构刚度提高,承载力增强。
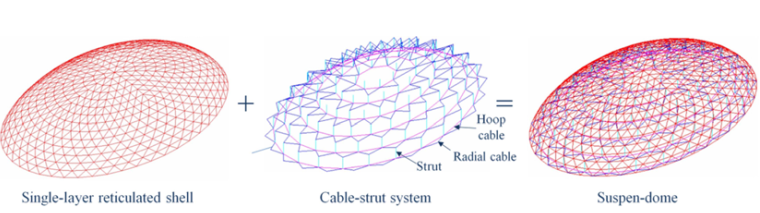
图一 悬架的典型结构系统
与单层球面网壳结构相比,弦支拱顶结构的空间刚度分布更加均匀,支座推力较小和更强的跨越能力。另一方面,它完全灵活比索穹顶结构更容易构造。因此,弦支拱顶结构因为它的机械性能,分析方法和设计程序获得越来越多的学者和工程师对它的关注。2003年康等人在弦支拱顶结构拉索预应力力计算上提出了一种简单的设计方法。非线性静态,动态和屈曲分析结果表明张拉整体系统(缆绳支撑系统)显著提高单层网壳结构性能系统。2005年kitipornchai等人研究了索预应力设计方法、简化分析方法和屈曲能力的估算。一些设计和施工指南是在分析结果的基础上采纳的。王等(2008a)研究三个体育馆的对大跨度弦支拱顶结构的钢屋架安装及张拉技术的施工技术。他们(2008b)还研究了大跨度的弦支拱顶结构在各种不利施工因素下的静态性能,包括支撑条件、安装缺陷和施工过程中的环境温度。陈等(2010)制定了通过多个节点为弦支拱顶结构分析制造多节点滑动缆绳元件并且能够在里面滑动。缆绳滑移效应还讨论了弦支拱顶结构的行为。刘和陈(2012)建立了闭合滑动多边形索单元分析带滑动缆绳接头弦支拱顶结构的结构行为。郭等(2012)采用1:15缩尺模型来试验弦支拱顶结构堆载下的静力性能。结果表明堆荷载比全跨荷载对于结构更重要,因此提出在设计过程中应考虑堆载力的问题及提出对策避免在
建设和有效服务过程中产生堆载力。刘等(2012)分析拉索预应力施工过程中温度变化的影响。此外,新的预紧力控制方法和简化计算公式验证了弦支拱顶结构。
对于较低的柔性索杆体系,对弦支拱顶结构要采用适当的方法进行形式分析。目前,力密度法和动态松弛法是最常用的形态分析方法(Veenendaal and Block 2012)。这两种方法
是为测定初始形式下完全一样的索穹顶结构和柔性张拉整体结构缆绳网而专门开发的。然而,由于网壳在弦支拱顶结构具有一定的刚度,虽然较低的缆绳支柱系统很灵活,在预紧前弦支拱顶结构仍是一个半网格结构整体。因此,这种半网格结构形式的分析应完全不同于柔性结构。叶等(2012)通过对形式的张弦梁结构查找步骤卸载提出一种命名方法,这也是一种半刚性结构。进行数值模拟张弦梁结构找形的实验研究结构来验证所提出的方法。然而,不同于张弦梁,在弦支拱顶结构中存在多层空间索杆体系及其相互影响,不能被他们所提出的方法包含。此外,多级预紧方案有必要对弦支拱顶结构施工实际实现预期设计目标。不同的预紧过程在不同受力状态后产生结果。因此,在弦支拱顶结构形式分析应考虑预紧过程的影响。然而,至今为止对它的研究还很少。
可以看出,目前的机械研究性能及弦支拱顶结构找形不涉及预紧过程的影响。这可能导致
预张拉结果误差大。然后弦支拱顶结构的机械性能也会受到影响。为了解决这个问题,本文开发了一种对弦支拱顶结构考虑张拉过程的新奇的迭代形式分析方法。结合逆形迭代
顺序预紧模拟,节点坐标主动拉索零状态和初始应变能通过所提出的方法准确地解决。这样,预计初始状态后,预紧力可以达到。此外,通过所提出的方法,张力控制力有源缆绳和其他中间状态参数也可以对实际预紧过程自动控制输出。
二、对弦支拱顶结构形式的分析内容
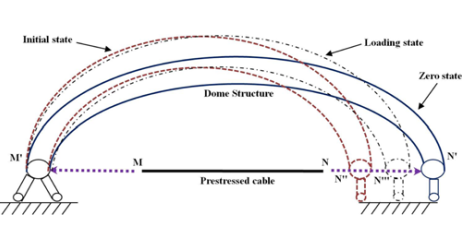
根据施工和设计过程,弦支拱顶结构可以分为如下三种状态,如图2所示:
图二 三种悬浮圆顶结构的状态
i) 零状态:单层网壳完全或部分组装,下部索杆系统组装但不张拉。在数值模拟中,这对应于数值模型构造但不分析的状态。
ii)初始状态:张拉索杆体系后,弦支拱顶结构在自重预应力效应下达到平衡状态。在数值模拟中,对应于在自重和预应力荷载作用下数值模型的状态。通常,在设计要求中定义初始状态。因此,形式分析的主要目的是从初始状态求解零状态。
iii)加载状态:在初始状态的基础上,弦支拱顶结构服从其他外部荷载达到一个新的平衡状态。在数值模拟中,这对应于数值模型分析时,外部负载被添加到初始状态的状态。加载状态不参与形态分析。这里讨论的是它的初始状态的密切关系。因此,可以看出,初始状态应该准确满足设计要求,确保结构在加载状态下可安全执行。
在零状态下,临时支撑通常设置在圆顶下支撑网壳结构和索杆体系在预张前的自重。结果,此时整个结构应力状态接近于零。当张拉过程开始,预应力锚索分批预紧。如图2所示,在张拉过程中,MN缆绳通过外部力量被张拉成M'N'然后锚定在一个圆顶结构上。然后释放外力。此时,预应力索与穹顶结构协同工作。由于缆绳已经拉伸,它有一个以恢复其原来的长度的趋势,导致整体结构的拱变形。结果,圆顶结构和临时支撑开始分离而且结构中产生预应力效应。张拉后,MN缆绳变形m'n”。所有的临时支撑可以移除。整体结构达到其初始状态。在外部荷载作用下,弦支拱顶结构将达到一个新的受力状态,即加载状态。同时,MN缆绳会变形成M'N '''。在一般情况下,缆绳中的几何参数和内力将被定义为初始状态的设计要求。但是如图2所示,弦支拱顶结构的几何结构在预紧后会产生一些变形。如果初始状态下的几何参数直接用于构件冲裁和结构总成可能会产生施工错误。此外,对于真正预紧过程中的复杂性,一些预张拉阶段对于弦支拱顶结构从零状态发展
为初始状态是有必要的。因为,对于预应力锚索在每个阶段应确定积极的张拉控制力。所以,在本文中考虑张拉过程中的形式分析应根据零状态到初始状态的初始状态参数与实际预紧过程,在零状态和张拉控制力方案,定义为求解结构几何构型。此外,从图2可以看出由张拉缆绳引起的预应力效应与索长与结构跨度之间初始不适配有关。换句话说,可以看出,由于初始缆绳变形导致将缆绳安装到穹顶结构上,这可以表示如下:
R = M'N' – MN (1)
因此,在考虑预张紧过程的形式分析中,应该为每个预张紧阶段求解R,以确定主动张紧缆绳的张紧控制力。
3.形式分析的迭代法
3.1悬吊式结构的刚度方程
考虑预应力和自重的影响,悬吊穹顶结构的初始状态分析的刚度方程可以描述如下:平衡方程:
物理方程:
几何方程:
其中G是几何矩阵; GT是G的转置,即平衡矩阵; F0是自重的节点力矢量; S是构件内力矢量; R是包括悬浮圆顶结构的两个子向量的初始变形向量:Rc和R1 = 0分别是预应力缆绳和其他非预应力构件的初始变形; Δ是构件伸长矢量; DI和Do分别是初始状态和零状态的节点坐标的向量; Ke是元素刚度矩阵。
代入方程 (3)和式 (4)代入式 (2),可以得到悬吊穹顶结构的以下刚度方程:
其中, 是悬吊结构的总体刚度矩阵。 应当指出,当求解方程(5)时,应考虑几何非线性效应以获得准确的分析结果。如公式 (5)中,如果已知Do和R,则可以使用一般的有限元求解方法容易地进行悬吊圆顶结构的分析。 然后可以获得初始状态下悬吊穹顶结构的节点坐标DI和缆索力PI。 然而,在形式分析中,DI和PI是已知的,而Do和R需要被求解。 这是一个反问题,不能使用等式(5)直接求解。 在本文中,提出了一种迭代方法来求解Do和R。
3.2形状分析的迭代法
实际上,形状分析的目的是选择合适的Do和R,使相应的节点位移和缆绳力精确等于初始状态要求DI和PI。因此,本节提出了一种迭代方法来解决这个问题。在开始时设置Do和R的近似值。 然后将在每个迭代步骤中修改,直到计算的初始状态结果足够接近DI和PI。在迭代过程结束时,Do和R将足够准确地匹配PI和DI。这意味着如果根据求解的Do和R构造结构,则将实现初始状态PI和DI中的设计要求。以这种方式,在形式迭代过程中考虑初始状态的影响,以解决初始几何状态和初始缆绳变形。
解决这个问题的迭代方法可以描述如下:
步骤1:将i定义为循环迭代数。在开始时使i = 1,并且Do和R的初始值设置如下:
步骤4:如果 和 都小于设定的容差,迭代将终止。 然后 是零状态下的求解节点坐标,并且 是缆绳从零状态到初始状态的最终初始变形。 否则,令i = i + 1并返回步骤2,下一轮迭代开始。 这个迭代过程将重复直到收敛。
应当指出,在上述迭代分析中,不考虑预张紧过程。因此,不能解决每个预张紧阶段的张紧控制力。此外,形状分析结果在一定程度上是误差,并且在实际预张紧过程中不能精确地实现预期的初始状态。在下面的部分中,提出了用于弦支拱顶结构的预张紧过程分析方法。
4.弦支拱顶结构的预紧工艺分析方法
在弦支拱顶结构的下部缆绳支柱系统中,通常存在各种环向和径向缆绳层。因此,应该采用多级预张力方案用于悬吊圆顶结构的预张紧过程。不同预应力阶段中的缆索力和结构形式具有相互影响。因此,在从零状态到初始状态的过程中应该经历一系列中间状态。这些中间状态也对初始状态的实现有影响。应通过适当的预张力过程分析方法考虑。
已经指出,下部缆绳-支柱系统的张紧过程可以被认为是预应力缆绳的强制安装。在数值模拟中,这对应于在缆绳上施加初始变形。因此,可以建立基于初始缆绳变形的顺序分析方法用于预张力过程模拟。在每个预张力阶段,相应的初始变形施加在该阶段的主动张紧的缆绳上以进行分析。然后根据实际预张力方案,可以准确地模拟所有缆绳用初始变形批量拉紧。结构应力和变形在每个预张紧阶段可以顺序解决。以这种方式,也可以自动包括中间状态对最终初始状态的影响。顺序预拉伸过程分析方法的程序如下:
步骤1:根据预定的预拉伸方案,预拉伸过程分为n个阶段。 因此,n + 1个时间点可以被
步骤3:在分析第(k + 1)th个预拉伸阶段(tk + 1)时,解决了第kth阶段(tk)的结构状态,包括结构刚度矩阵K(k),节点坐标D(k), 力F(k)在其他非预应力构件S(k)。 在第(k + 1)th级中,一些电缆和支柱将被张紧以与穹顶结构一起工作。它们的元素刚度矩阵KES(K+1)被激活,并且在这些电缆上施加初始变形Rk+1(k+1)以模拟该阶段中的预张紧过程 。 同时,一些临时支架将通过预张力从拱顶结构分离以获得拱形效果。 这些支架的基本刚度矩阵Keb(k+1)将被杀死。 然后从tk到tk + 1的刚度方程可以表示如下:
通过求解 (11),可以获得节点位移和缆索力从tk到tk + 1的增量。 因此,可以确定第(k + 1)th级中的结构状态,包括D(k+1),P(k+1)和S(k+1)。 此外,在该阶段中激活的电缆中的解的内力Pk+1(k+1)表示这些电缆的张紧控制力。
步骤4:当最后级tn的分析完成时,将获得初始状态下的节点坐标D(n)和缆索力P(n)。 此外,在零状态和初始状态之间的每个恐吓阶段中的张紧控制力T可以被确定为:
T = {P1(1),P2((2),….,Pn(n)} (12)
5.考虑拉伸过程的形状分析方法
梳理逆形式,迭代法在第3节和连续预紧模拟方法在第4节,可以形成考虑弦支穹顶结构预应力工艺形式分析方法,如图3。
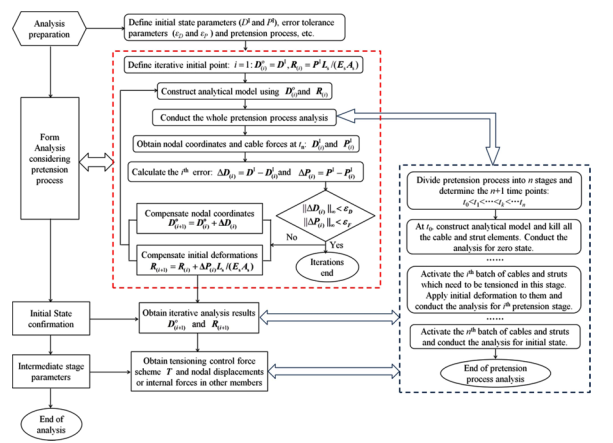
图3.考虑预拉伸工艺的形状分析方法流程图
整个分析过程可以分为四个步骤:
步骤1:分析制备。在此步骤中,应根据设计图纸和构造方案来定义一些必要的分析前提条件,包括:初始状态DI中的节点坐标,初始状态PI中的电缆力,详细的预张紧过程(例如阶段分割和临时支柱布局)。此外,节点坐标公差εD和电缆力公差εP需要定义为形式分析中的迭代结束条件。理论上,εD和εP应设置为小使得解决的解决方案更准确。然而,当容差非常小时,它需要巨大计算时间来完成迭代过程,特别是对于大型悬挂圆顶带有许多杆,支柱和电缆。此外,在实际工程中,悬浮圆顶的跨度通常大于30米,电缆力大于100kN。公差不需要非常小,因为施工误差可能比它大。因此,值的公差取决于工程精度要求和计算硬件限制。例如,根据作者的经验,以下值可以推荐对于小于4层的相对小规模的悬挂环形电缆:
(εD, εP) = (0.001 m, 1000 N) (13)
步骤2:考虑预拉伸过程的形式分析。 这是整个分析中的关键步骤。 开始时,DI被假定为零状态下节点坐标的第一近似值。 通过使用它,可以构建分析模型。 此外,从PI直接计算的初始电缆变形也被认为是从零状态到初始状态的预张力过程分析的第一近似值。 然后通过第4节中的方法分析整个预张紧过程。在预张紧过程分析之后,可以获得最终预张紧阶段的节点坐标和缆索力。 根据3.2节中的迭代方法,将修改近似节点坐标和电缆初始变形。 然后可以更新分析模型用于下一轮预紧过程分析,直到满足迭代结束条件。
步骤3:初始状态确认。当形式分析中的迭代过程结束时,最终迭代值,D(i+1)0和R(i+1)作为最终形式分析结果获得。这时,通过使用D(i+1)0和R(i+1)再次进行预拉伸过程分析,以确保可以满足初始状态。
步骤4:通过使用D(i+1)0和R(i+1)的预拉伸过程分析结果,可以获得每个预拉伸阶段的张紧控制力。此外,所有的节点也可以计算整个过程中的位移和构件力。这些中间状态参数可以提供用于真实预张紧过程的监控和控制。
应该指出的是,在有限元模拟中,通常通过在电缆上施加初始应变或降低电缆的环境温度来模拟预应力。此时,初始电缆变形R可以等于初始应变或温度下降。以这种方式,可以确保形式分析以获得准确的分析结果。
6.示例
6.1数值示例
如图4所示,Kewitte风格(K6)悬吊圆顶45 m跨度,4.5 m高和3.5 m支柱长度作为数值示例。 负荷设计值为2.0 kN / m2,构件的横截面尺寸根据a确定全应力原理。 杆和支柱的弹性模量为2.06×105 MPa,电缆为1.9×105MPa。
如表4所示,通过IFA和FAP求解的节点J1-J4的坐标之间存在较大的差异。原因在于这些节点具有从零状态到初始状态的较大位移。通常,由于网状壳具有相对较大的刚度,在两种方法下的节点坐标结果的差异不显着。然而,从表5可以看出,解决的环箍电缆的初始应变在IFA和FAP之间有很大差异。其原因应该是预张力过程对电缆力的巨大影响。根据表4和表5中的形式分析结果,更新分析模型,并且预紧过程是通过第4节中的方法模拟。通过对每个阶段中主动张紧的电缆顺序施加相应的初始应变,可以在所有电缆张紧之后实现环形电缆中的力。将这些结果与初始状态要求的目标值PI进行比较,如表6所示。
从表6可以看出,IFA解决的环带电缆中的力与初始状态下的目标值有很大不同。特别是对于HC4,误差达到47.3%。这是因为在IFA的形式分析中没有考虑预拉伸过程中缆索力之间的相互影响。结果,由IFA解决的初始电缆应变不能根据预定的预张紧方案将结构从零状态发展到预期的初始状态。至于FAP,分析结果为符合初始状态要求。最大误差仅为2%,小于设定公差εP= 5 kN。因此,在悬吊穹顶的形式分析中,应考虑预紧过程的影响,以获得准确的节点坐标和初始电缆应变。此外,FAP可以自动地输出用于每个预张紧阶段中的主动张紧环形缆索的张紧控制力以及被动缆索中的力,如表7所示。表7中所示的数据是张紧控制力T。
7.结论
本文提出了一种考虑悬吊穹顶结构预应力工艺的新型形状分析方法。通过组合反演形式迭代和顺序预应力模拟,可以通过提出的方法精确求解零状态的节点坐标和主动张拉电缆的初始应变。此外,由于包括预应力过程的影响,形状分析结果可以自动输出有源电缆的张紧控制力方案和无源电缆中的力以及每个预张力状态中的节点位移。这些中间参数可以提供对实际预拉伸过程的控制。使用两个示例来验证所提出的方法。数值示例结果显示
节点坐标和缆索力的误差都可以稳定地收敛到设定的公差。根据预定的预紧方案,形式分析结果可以准确地实现预期的初始状态。工程实例结果表明不考虑预应力过程的影响,零状态下的解节点坐标有一定误差,初始电缆应变与准确值有较大差异。当这些结果用于预张力过程模拟时,所有电缆张紧后的最终状态与预期初始状态大大偏离。然而,这可以通过本文提出的方法精确实现。
致谢
本研究由“江苏省自然科学基金”(BK2010428),“中央高校基础研究基金”和“江苏高等教育机构优先学科项目发展项目”共同赞助。 感谢支持。