














��ICP��112451047180��-6
����������������ϵͳ�������
ժ Ҫ
�������������Ե�Ƭ������ϵͳ��Ϊ���������Ƶĺ��ģ��ɴ�������Ӧģ��,�������ݿ���ģ�飬��ˢ������ٿ���ģ��,��Դģ��ȹ��ɡ�����������������ƽ�϶����ʵʱ����ϵͳ����֤��ϵͳ�ĸ߿ɿ��Ժ�ʵʱ�ԣ��������������ɡ���ͣ������ȷ���ģ̬�Ŀ���Ҫ��
�ؼ��ʣ�����ģ����������˷�����������ϵͳ��
Ŀ ¼
1.���� 4
2.�ṹ��ʽ�빤��ԭ�� 4
2.1�ṹ��ʽ 4
2.2����ԭ�� 4
3.Ӳ����� 5
3.1��Ƭ�����ƺ��� 5
3.2���ƺ����л�ϵͳ 7
4. ���� 8
4.1�л�����������ͼ 8
5. ���� 8
����� 9
��л 9
��¼ �л������ƴ��� 10
1.����
��Ŀǰ�������������ϵͳ�������ɵ����ĵ�Ƭ��Ϊ���ƺ��ģ����ͻ��״������ʱ�������·������١�����Ŀ���ϵͳ��ΪӦ����Ŀǰ����ķ���֮һ��ͨ���л��źţ����������еı��ú��ķ��п���ϵͳ���Է������Ķ�������ϵͳ���нӹܿ��ơ���֤���������������У��Ӷ���߷��еİ�ȫϵ����
2.�ṹ��ʽ�빤��ԭ��
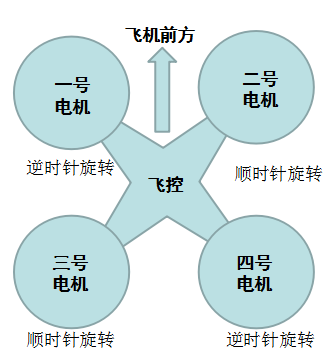
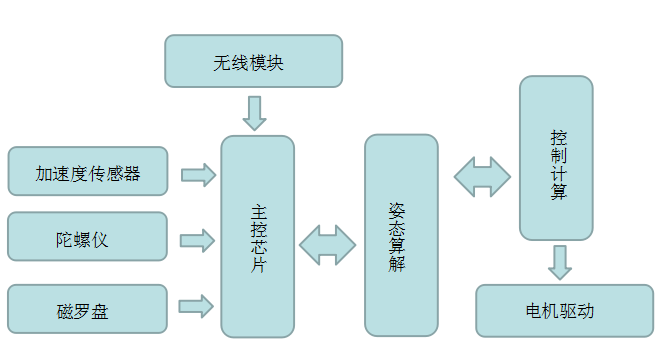
2.1�ṹ��ʽ
ϵͳ��stm32��Ƭ����Ϊ���������������Ƶĺ��ģ��ɵ�Դģ�顢������ٿ���ģ�顢���������ģ�顢����������ģ��ȹ��ɡ�ϵͳ�ṹͼ��ͼ2.1��ʾ��
�����
[1] ����־���������������ͷ���������ϵͳ���[J]���������������ƣ�2008��16(4)��485-490��
[2] �²�ʱ�������϶��Զ�����ϵͳ[M]����������е��ҵ�����磬2005��
[3] �����磮������ͼ����ϵͳ�����[D]���ɶ������ӿƼ���ѧ��Ϣ��ͨ�Ź���ѧԺ��2005��
[4] KHALLIL H��Nonlinear systems[M]��3rd ed��SpringerPress��2003��
[5] �����磬��쿣�����ƽ��STM32ϵ��ARM Cortex M3������ԭ����ʵ��[M]���������������պ����ѧ�����磬2008��
[6] ����Ӣ������ɽ������STM32�Ķಽ���������ϵͳ�о�