��ICP��112451047180��-6
����PLC�Ķ�ά�˶��켣�������������Ľ����
ժ Ҫ
Ŀǰ��Уʵ������ʹ��PLC���ƶ�ά�켣�˶�ƽ̨Ӧ�û��������룬�谭��ѧ����ѧϰʵ������˱�������������Զ�ά�켣�˶�ƽ̨Ϊ����������������S7-200 ����ģ�������ж��ο�����ʹ��������õĹ켣�˶��������������������ʵ�鹦�ܡ�
���ĸ�����ԭ����Ľṹԭ�������д��ڵ����⣬����˱��ĵ�PLC���Ƴ���ĸĽ���Ʒ����������˳���ṹ��ϸ���ϵĸĽ���ƣ���PLC���Ƴ��������ͽṹ����ȷ������ʹ�����Ĺ켣�����һ�£�ʵ����ͬһ�ι켣ϸ��������ȷ�任����д�˸����ӵĺ�������ʵ�������ȶ���ȷ�Ļ��ƣ�ͬʱ�ܲ���MCGS��̬������Ϊ��λ����������Զ�ά�켣�˶�ƽ̨���м�ء�Ϊ����PLC����ʵ�������˿ɿ�������ƽ̨��
�ؼ�����PLC�����Ƴ��켣���ƣ�MCGS
��һ�� ����
1.1ѡ�ⱳ��
������������У����ʵ���ҽ�����Ŀ:“PLC����ʵ����”Ϊ������չ�������о������ġ���������Զ����������Ϸ�չ,Ӧ��������չ,���Զ��������˲�Ҳ�����Խ��Խ�ߵ�Ҫ��, ����Ӧ�ü�����һ��ʵ���Ժ�ǿ��ѧ��,ʵ������������Ҫ,ֻ��ͨ������ȫ���ʵ�ʲ���,����ѧͨѧ��Ȼ��������ѧ��ʵ��λ���,ѧ��������һЩ��֤�Ե�ʵ��Ϊ��,���ٵĴ������������ϵͳ�ĸ߶��Ͻ����ۺ���ʵ��ʹ�����ơ�
�����Ĺ�ҵ����ϵͳһ���������������ز��֡����ض���������,��ͼ1-1��ʾ��

ͼ1-1 ����ϵͳ���ʾ��ͼ
�ڿ�����ƽ�,���ض�����������������Ҫ����Ҫԭ������:��ʵ�ʱ��ض�
������û�н���,����ϵͳ����ƺͱ��ض�������ͬʱ����;�ڿ���ϵͳ����Ƶص�ͱ��ض�����������ͬһ���ط�;��ijЩ�����,ֱ���ڱ��ض����Ͻ��е��Դ���Σ�ա�
ѧУʵ������ѵ��,���ض�������Ҳ����������Ҫ����Ҫԭ������:��ʵ�ﱻ�ض�������۸�ά������,ѧУһ�㲻�Ṻ��;��ʵ�ﱻ�ض����Ӳ��ģ�ͼ۸�ߡ�����Բ�,ֻ�������������ʵ�顣����,����һ�ִ���С������Ըߡ�������ϵʵ�ʡ���������ʵ����ѧ���ڵķ��汻�ض�����й㷺����ʵ����,���������ּ���ǽ���һ�ַ��汻�ض���,������������ַ��汻�ض����PLC����ϵͳѵ��ƽ̨[1]��
1.2�����
Ϊ������繤��ϵѧ���ṩһ��ʵ�ʶ�����ƿ���ϵͳ��ѵ��ƽ̨,ѧУ������“PLC����ʵ����”����ʵ���ҽ�����Ŀ,Ϊ���PLC ����ʵ���ҽ��������ʵ������Ҫ����Ӧ��ʵ��ƽ̨������Ŀ��Ƴ���س���ǰʵ������ʹ�õ�PLC���ƶ�ά�ŷ�ƽ̨��Ȼ����ǰ�Ŀ��Ƴ���ͼ�س��������룬��˱�������������Զ�ά�����ŷ�����ƽ̨Ϊ����������������S7-200 ����ģ���ƽ̨���ж��ο��������ƣ�ʹ��������õĹ켣�˶��������������������ʵ�鹦�ܵȡ�Ϊ����PLC����ʵ������ɿ�������ƽ̨��
1.3�ɱ����������ĸ���
�ɱ�����������Programmable Logic Controller�����Ϊ PLC�����ڼ���������͵������Ƽ����Ļ����Ϸ�չ�����ģ�������չΪ��������Ϊ���ģ��Ѽ�����������Զ���������ͨ�ż����ں�Ϊһ�����һ��ͨ�ù�ҵ����װ�á����ѱ��㷺Ӧ���ڸ����������̺�������е���Զ������У����в������㡢�������ɿ��Ըߵ��ص㣬��Ϊһ�����ռ�������Ҫ��Ӧ�ó������Ĺ�ҵ����װ�ã���Ϊ�ִ���ҵ�Զ�������ϵͳ�������Ҫ֧��֮һ[2]��
PLC���������ص�:�ٿɿ��Ը�,����������ǿ;�ڱ�̼�,ʹ�÷���;����ư�װ����,ά����������;�ܹ�������,ͨ����ǿ;�����С,�ܺĵ�;�����ܼ۸�ȸߡ�PLC�ڹ������ѹ㷺Ӧ���ڸ�����ʯ�͡����������������ġ���е���졢��������ġ���ͨ���䡢�������Ļ����ֵȸ�����ҵ[3]��
1.4�ɱ���������ʵ��ϵͳ��Ӧ����״
�Դ�70�����������,�Ѿ�������һ����ҵ�����ĸ������ڷ���Ĺ�ҵ����,�ɱ����������Ѿ��㷺Ӧ���ڸ��и�ҵ,�ÿɱ�������������Զ�����ϵͳ�ѳ�Ϊ���糱��,�����ǹ��ҿɱ�����������Ӧ�÷�Χ��������,�����ڷ���δ��֮�ơ��ɱ�����������ѧ��80������ڿ�ʼ�ڸ���ѧУ���ռ�,���ѳ�Ϊ��ҵ�Զ�����Ӧ�õ��ӡ�����һ�廯��רҵ����Ҫ�γ�֮һ��
�ɱ���������ԭ����Ӧ�����ſγ̵��ص��ǿɱ���������ԭ���������ݽϳ���,Ӧ�ò���������ʵ�����ܽ��,ʵ���Խ�ѧ����ռ�нϴ�ı��ء��ڴ����ѧУ�пɱ����������γ̵�ʵ��ʵѵ��ѧ������Ҫ�ǿɱ����������ı��ѵ��,ʵ��ʵѵʱѧ��������Ҫ�ɱ���������������/�����������ƶ������Ӻ�,Ȼ�������ѱ�õij����ԡ�����,�۲���ƶ���Ķ����Ƿ���Ҫ��Ŀ��ƹ���һ�¡��������ɱ���������ʵ��ʵѵ�豸�ķ�չҲ��Ѹ��,�������з���:
��1�������Կɱ���������������ʵ���ѧ,��û�п��ƶ���,ѧ���ñ�����Կɱ������������б��֮��,ͨ���۲�����ڵ�״̬��ȷ�����������������������ѧ��ʽ��ѧ������ֻ�ܽ�����֤��ʵ��,û������������Χ�豸�����ӺͿ��ơ�
��2����������ʵ����,����ԭ�еĵ綯���Ȼ����豸��Ϊ���ض���ѧ��ʵ��ʱ������Ҫ�����Ӻ���·,ͨ��ר�õı�������벢�������г���,�۲챻������Ķ����Ƿ������Ҫ�����������ʵ����Ͷ��С,�������ڶ�,ȱ����ԭ�еĻ����豸������ȫ�ʺϿɱ���������ʵ���Ҫ��,�ܿ�����ʵ����١�
��3��ר�ŵĿɱ���������ʵ����,��ʵ������װ�пɱ�������������,ͬʱ�÷��������ģ�ⱻ�ض���,����ִ�к�ͨ����������ܵ���������۲�ʵ������,�������Ʒ��������λ���Ľӿڵ�·,����ͨ����λ�������������ʵ���豸Ͷ������,����ʵ������ֱ��,��ʵ����ϴ�,����ѧУ�Ѿ�����ѡ�������豸[4]��
���ڴ�,���������Զ�ά�����ŷ�����ƽ̨Ϊ����������������S7-200����ģ���ƽ̨���ж��ο��������ƣ�ʹ��������õĹ켣�˶��������������������ʵ�鹦�ܵȡ�Ϊ����PLC����ʵ������ɿ�������ƽ̨��
1.5�ɱ������������ŷ�����Ŀ���
���ڲ�������������ŷ�������Ƶ�һ�֣�������в��ò����������ϵͳ�Զ�ά�ŷ�ƽ̨���п��ơ�
�����������ϵͳ,��һ��һλ����ϵͳ,��ν��һλ����,���ǿ��Ƶ綯���϶����ش�һ��λ�����е���һ��λ�á��Բ����������,���ǿ��Ƶ綯����һ������λ���������ɲ�������һ��λ�ý�������״̬������Ҫ��綯��ʵ�����еIJ���һ��Ҫ���趨���,�����������[5]��
1.5.1 PLC�ŷ��������ϵͳ�������
�ִ����˶����Ʒ�����Ҫ��ֱ���ŷ������������ŷ������������ŷ����������н����ŷ��������������,���۸�ϸߡ����Ų����ŷ��������Ƽ���Ѹ�ٷ�չ,�����ŷ�����ϸ�־����������,���˷�����,ʧ���IJ���,���Լ۱ȴ������ߡ����������ֱ���������źſ���,���跴���ɿ�������,���ۻ���λ���,���ƾ��ȸ�,��˱��㷺�������ֿ��ƺͼ�������ƵȾ��ܶ�λ�Ŀ���ϵͳ�С�
�ɱ���������PLC��һ�����ڹ�ҵ�ֳ����Ƶļ���ƽ̨��PLC�ۺ��˼�����������Զ����Ƽ�����ͨ�ż���,ʹ��������̡������û��ļ������,�û���ͨ���������,ʵ�ָ��ָ��ӵ������ơ�S7-200 PLC���нϺõ�ʵʱˢ�¹���,���Բ���һ��Ƶ�ʵ������ź�,���Ҿ��д��ʵľ��������ӿ�,�ܹ����㲽���������ĵ�ѹ�͵���Ҫ�����,��ϵͳ����S7-200ֱ�ӿ��Ʋ����綯��������ϵͳ,ʵ�ֶ���Ŀ���,��ϵͳ�Ľṹ��ͼ1-2��ʾ��

ͼ1-2 PLC���Ʋ������ϵͳʾ��ͼ
��λ�������Ľ�������λ���ź�ͨ��A/Dת��������PLC,PLC���ݸ�λ���ź���PID�������λ���ź���Ƚϼ������Ӧ�IJ������λ��,�����һ����Ӧ�������źŸ����η�����,���η�����������ĵ�һ���崮��������ʽ��ת��ֱ����������ӵ����������������Ĺ��ʷŴ�����������,�Ա��γ���ת�ų����ɴ��γɵĸ������źž�����Ĺ��ʷŴ���,�����㹻�ĵ��ת��ʹ�綯����ת�����IJ���PLC�ڲ�������ʵ������Ƶ�ʱ仯�Ĺ���,������Ӳ���ɱ�,�����൱��ʵ�ü�ֵ��
��������Ľ�λ������������ĸ���������;ת��������Ƶ�ʳ�����;ת����������䵽��������ĸ�������������йء��������PLC�ɲ���һ�����ڵĿ�������,ʹ��λ�Ĵ�����λ,������Ӧʱ��,ͨ�����η�����ʹ����̵�����ʱ���ͨ��������������ɼ����������������,ʹ���������һ���ٶ�,ת��һ���ĽǶȡ����ݹ���Ҫ��,�ۺϿ��Dz������������,ѡ�����ص�������ķ�Ӧʽ���ಽ�����,��������ת�����㹻������,��ѡ�����������Ҫ�������벽���������ʱ,�Ȱ������Ȧ��һ�˶��ӵ�+12V��,��һ�˰�һ����˳��ӵ�����������Ȧ����ˡ�
1.5.2����ϵͳ��ʵ��
���IJ���������S7-200ϵ��PLCΪ����,����S7-200PLC����·���������������,һ·�������������Q0.0�����������������,ͨ���ı�Q0.0��������Ƶ�������Ʋ��������ת��,��һ·��������������Q0.1����Q0.0���������Ƶ�� ,����������ṩ�ȶ���������ѹ,����������ʵ�ֲ��������Ƶ��ѹ������·�Ĺ���,�������Ŵ��·һ��,ʵ���˿��١��߾��Ȳ����������������Ҫר�ŵ���Ƶ��ѹ��·,������Ӳ����·�ĸ�����,�ṹ��,�ɱ��͡�
��1�����������������
�������������ԭ����ͼ1-3��ʾ��

ͼ1-3 �������������ԭ��ͼ
���������λ����ͨ����λ����EM235 A/Dģ��ת���ɿ�������ʶ���������,�볡ֵ���бȽ�,�������ֵ,�������ֵ���һλ���ڲ��ȶ�״̬,��Ӧ�Բ�ֵ������������,����ֵ������������ֵʱ,�Բ�ֵ���зŴ�,Ȼ��ֵ����һ���Ļ��㷽ʽ����ɲ������������Ƶ��,�Ӷ����Ʋ��������ת���ٶȡ�
�ڶ��� ��ά�˶��켣�������������Ľ��������
��������ϵͳ��Ϊ�������֣���PLC Ϊ������������ϵͳ����λ��MCGS���ϵͳ�����¼��Խ�����PLC���ƵĶ�ά�켣�˶�ƽ̨ϵͳ���Լ��������ԭ�����飬���������ϸ�ĸĽ�������
2.1��ά�켣�˶�ƽ̨��ϵͳ���
��������PLC���ƵĶ�ά�켣�˶�ƽ̨��������̵Ļ���,��ƽ̨�ɵ������Ʋ��֣���е�����Լ��������ֹ��ɡ�����ϵͳ�Ŀ��ƶ���Ϊ�����ŷ���������˶���X-Y��еƽ̨��ϵͳ�ĵ������ƺ��IJ���������S7-200 CPU224 PLC����������Ϊ�����֣�����һ����ΪPLC����ִ�еĿ��Ƴ�����һ��������λ�����˻��������棬��MCGS��̬������д���ɡ�Ϊ�˸��õ��˽��̣��б�Ҫ���˽�һ�¶�ά�켣�˶�ƽ̨��ϵͳ���±��Խ�������ϵͳ�빦�ܡ�
��1��ϵͳ��ɣ�
����ϵͳ������ͼ2-1����ά�켣�˶�ƽ̨��һ���ܻ���һ�廯��ѧ�豸��������PLC ������������䡢��ά��еƽ̨��S7-200 �������DZ���ϵͳ�ĺ��IJ��������������ŷ��˶����Ƽ�I/O ��Ĺ��̿��ƹ��ܡ����˶����ƹ����У��������Ϳ���ָ����ŷ������������������������ŷ�����˶�������������ά��еƽ̨�˶���PLC����������PPIͨ��Э�飬ͨ��RS485���нӿ����ӡ�������ȫ����Ƴɶ�����ģ�飬��������ͬ��ʵ��������顣
��ά��еƽ̨��һ�����ù���˿�ܴ�����ģ�黯ʮ�ֹ���̨������ʵ��Ŀ��켣�Ͷ�����Ϊ�˼�¼�˶��켣�Ͷ���Ч����ר���䱸�˱ʼܺͻ�ͼװ�á�ʵ��ϵͳ��������������Ŀ��ơ���������ϵ�Ŀ��ơ�����༭�����С����ش���༭�����С������˶��켣���ơ�ϵͳ�ļ����������Ƶ�ģ�飬���ھ����ʵ���������Ӧ������ģ�顣
������൱��һ��С�͵ĵ������ƹ����ŷ�����������ֵ�Ԫ�����߶����Ź��ɡ���ά��еƽ̨�������ź��߶����������Ľ��߶����ţ�PLC��I/O��Ҳ���������Ľ��߶��������ά��еƽ̨���������źŶ�Ӧ��

ͼ2-1 ϵͳ��ɿ�ͼ
��2��ϵͳ������
��PLC�������������ͨ�����巽������ŷ�����������������������ŷ�����������ŷ�����Դ�����������������ٶ��Լ�λ����Ϣ����������ͬʱ����ͨ��PLC�ĸ�����������ڷ�����PLC CPU���Ӷ�����һ�����ƻ�·��������ⲿ�����������뵽PLC CPU ������ƣ���λ��ͨ����̬����ʵ�ֶ�ϵͳ�Ŀ��Ƽ���[11]��
��3��ϵͳ���ܣ�
���Զ������ŷ����������Ч���ƣ�ʵ�����������岹���ܣ��������ֲ�ͬ���߹켣�˶���ͨ����űʻ����������������Ρ������Ρ����ҡ��������ߡ������ߵȡ��������Զ��幦�ܣ�ѧ�����Է����Լ����������ͼ�ι켣��
������ �ܽ���չ��
6.1�ܽ�
���Ź�ҵ�Զ����IJ��Ϸ�չ����У�Զ���רҵѧ����ʵ������Խ��Խ�ܵ����ӡ������Ƚ��걸�Ĺ�ҵ����ϵͳʵ���ң���ѧ���õ����Ϲ���ʵ�ʵĶ���������Ϊ�ձ鹲ʶ����У�Ķ�ά�켣�˶�ƽ̨��������˳Ӧ�������Զ����˲�������Ҫ��
�����ڵ�ʦ�ľ���ָ���£����豸���̻����Ͻ����������ʵ�֡����ĵ������Ƕ�ά�˶��켣�������������ĸĽ���ƣ��ڴ˹�������Ҫ��ƺ�ʵ����һ�ֻ���PLC�������幦�ܿ�����Բ���岹���ܵ�������ƣ�ʵ�ֹ켣�Ļ��ƣ���Բ�Σ�����ǣ������ߣ������Զ����ͼ�Ρ�����˿��������Ķ��ο������������õĹ켣�˶����������������������ʵ�鹦�ܡ�Ϊ����PLC����ʵ�������˿ɿ�������ƽ̨��
6.2չ��
��Ȼ������ƻ�������˼ȶ������������Ҫʹ����PLC���ƵĶ�ά�켣�˶�ƽ̨���õķ������ã����кܶ��Ҫ����
��1������PLC���ƵĶ�ά�켣�˶�ƽ̨���ֻ��ʵ��һ�������Ļ��ƣ��д��ڽ�һ����������DZ������ѧ�����뿪��PLC���Ƴ�����ѧ���Ĵ��²��ܣ���Ƴ�����Ȥ���ӵ�ͼ�Σ�����ѵ��ƽ̨���ں���
��2�����������ģ����ƣ�����ʱ��ԭ�����ļ������ֻ��ʵ�ֿ��ƶ�ά�ŷ�ƽ̨����ͼ�Σ����ڵ�����ģ�⻭��ͼ�Σ��д�������н�һ���ı��ʵ�ָù��ܡ�
ժ Ҫ
Ŀǰ��Уʵ������ʹ��PLC���ƶ�ά�켣�˶�ƽ̨Ӧ�û��������룬�谭��ѧ����ѧϰʵ������˱�������������Զ�ά�켣�˶�ƽ̨Ϊ����������������S7-200 ����ģ�������ж��ο�����ʹ��������õĹ켣�˶��������������������ʵ�鹦�ܡ�
���ĸ�����ԭ����Ľṹԭ�������д��ڵ����⣬����˱��ĵ�PLC���Ƴ���ĸĽ���Ʒ����������˳���ṹ��ϸ���ϵĸĽ���ƣ���PLC���Ƴ��������ͽṹ����ȷ������ʹ�����Ĺ켣�����һ�£�ʵ����ͬһ�ι켣ϸ��������ȷ�任����д�˸����ӵĺ�������ʵ�������ȶ���ȷ�Ļ��ƣ�ͬʱ�ܲ���MCGS��̬������Ϊ��λ����������Զ�ά�켣�˶�ƽ̨���м�ء�Ϊ����PLC����ʵ�������˿ɿ�������ƽ̨��
�ؼ�����PLC�����Ƴ��켣���ƣ�MCGS
��һ�� ����
1.1ѡ�ⱳ��
������������У����ʵ���ҽ�����Ŀ:“PLC����ʵ����”Ϊ������չ�������о������ġ���������Զ����������Ϸ�չ,Ӧ��������չ,���Զ��������˲�Ҳ�����Խ��Խ�ߵ�Ҫ��, ����Ӧ�ü�����һ��ʵ���Ժ�ǿ��ѧ��,ʵ������������Ҫ,ֻ��ͨ������ȫ���ʵ�ʲ���,����ѧͨѧ��Ȼ��������ѧ��ʵ��λ���,ѧ��������һЩ��֤�Ե�ʵ��Ϊ��,���ٵĴ������������ϵͳ�ĸ߶��Ͻ����ۺ���ʵ��ʹ�����ơ�
�����Ĺ�ҵ����ϵͳһ���������������ز��֡����ض���������,��ͼ1-1��ʾ��
ͼ1-1 ����ϵͳ���ʾ��ͼ
�ڿ�����ƽ�,���ض�����������������Ҫ����Ҫԭ������:��ʵ�ʱ��ض�
������û�н���,����ϵͳ����ƺͱ��ض�������ͬʱ����;�ڿ���ϵͳ����Ƶص�ͱ��ض�����������ͬһ���ط�;��ijЩ�����,ֱ���ڱ��ض����Ͻ��е��Դ���Σ�ա�
ѧУʵ������ѵ��,���ض�������Ҳ����������Ҫ����Ҫԭ������:��ʵ�ﱻ�ض�������۸�ά������,ѧУһ�㲻�Ṻ��;��ʵ�ﱻ�ض����Ӳ��ģ�ͼ۸�ߡ�����Բ�,ֻ�������������ʵ�顣����,����һ�ִ���С������Ըߡ�������ϵʵ�ʡ���������ʵ����ѧ���ڵķ��汻�ض�����й㷺����ʵ����,���������ּ���ǽ���һ�ַ��汻�ض���,������������ַ��汻�ض����PLC����ϵͳѵ��ƽ̨[1]��
1.2�����
Ϊ������繤��ϵѧ���ṩһ��ʵ�ʶ�����ƿ���ϵͳ��ѵ��ƽ̨,ѧУ������“PLC����ʵ����”����ʵ���ҽ�����Ŀ,Ϊ���PLC ����ʵ���ҽ��������ʵ������Ҫ����Ӧ��ʵ��ƽ̨������Ŀ��Ƴ���س���ǰʵ������ʹ�õ�PLC���ƶ�ά�ŷ�ƽ̨��Ȼ����ǰ�Ŀ��Ƴ���ͼ�س��������룬��˱�������������Զ�ά�����ŷ�����ƽ̨Ϊ����������������S7-200 ����ģ���ƽ̨���ж��ο��������ƣ�ʹ��������õĹ켣�˶��������������������ʵ�鹦�ܵȡ�Ϊ����PLC����ʵ������ɿ�������ƽ̨��
1.3�ɱ����������ĸ���
�ɱ�����������Programmable Logic Controller�����Ϊ PLC�����ڼ���������͵������Ƽ����Ļ����Ϸ�չ�����ģ�������չΪ��������Ϊ���ģ��Ѽ�����������Զ���������ͨ�ż����ں�Ϊһ�����һ��ͨ�ù�ҵ����װ�á����ѱ��㷺Ӧ���ڸ����������̺�������е���Զ������У����в������㡢�������ɿ��Ըߵ��ص㣬��Ϊһ�����ռ�������Ҫ��Ӧ�ó������Ĺ�ҵ����װ�ã���Ϊ�ִ���ҵ�Զ�������ϵͳ�������Ҫ֧��֮һ[2]��
PLC���������ص�:�ٿɿ��Ը�,����������ǿ;�ڱ�̼�,ʹ�÷���;����ư�װ����,ά����������;�ܹ�������,ͨ����ǿ;�����С,�ܺĵ�;�����ܼ۸�ȸߡ�PLC�ڹ������ѹ㷺Ӧ���ڸ�����ʯ�͡����������������ġ���е���졢��������ġ���ͨ���䡢�������Ļ����ֵȸ�����ҵ[3]��
1.4�ɱ���������ʵ��ϵͳ��Ӧ����״
�Դ�70�����������,�Ѿ�������һ����ҵ�����ĸ������ڷ���Ĺ�ҵ����,�ɱ����������Ѿ��㷺Ӧ���ڸ��и�ҵ,�ÿɱ�������������Զ�����ϵͳ�ѳ�Ϊ���糱��,�����ǹ��ҿɱ�����������Ӧ�÷�Χ��������,�����ڷ���δ��֮�ơ��ɱ�����������ѧ��80������ڿ�ʼ�ڸ���ѧУ���ռ�,���ѳ�Ϊ��ҵ�Զ�����Ӧ�õ��ӡ�����һ�廯��רҵ����Ҫ�γ�֮һ��
�ɱ���������ԭ����Ӧ�����ſγ̵��ص��ǿɱ���������ԭ���������ݽϳ���,Ӧ�ò���������ʵ�����ܽ��,ʵ���Խ�ѧ����ռ�нϴ�ı��ء��ڴ����ѧУ�пɱ����������γ̵�ʵ��ʵѵ��ѧ������Ҫ�ǿɱ����������ı��ѵ��,ʵ��ʵѵʱѧ��������Ҫ�ɱ���������������/�����������ƶ������Ӻ�,Ȼ�������ѱ�õij����ԡ�����,�۲���ƶ���Ķ����Ƿ���Ҫ��Ŀ��ƹ���һ�¡��������ɱ���������ʵ��ʵѵ�豸�ķ�չҲ��Ѹ��,�������з���:
��1�������Կɱ���������������ʵ���ѧ,��û�п��ƶ���,ѧ���ñ�����Կɱ������������б��֮��,ͨ���۲�����ڵ�״̬��ȷ�����������������������ѧ��ʽ��ѧ������ֻ�ܽ�����֤��ʵ��,û������������Χ�豸�����ӺͿ��ơ�
��2����������ʵ����,����ԭ�еĵ綯���Ȼ����豸��Ϊ���ض���ѧ��ʵ��ʱ������Ҫ�����Ӻ���·,ͨ��ר�õı�������벢�������г���,�۲챻������Ķ����Ƿ������Ҫ�����������ʵ����Ͷ��С,�������ڶ�,ȱ����ԭ�еĻ����豸������ȫ�ʺϿɱ���������ʵ���Ҫ��,�ܿ�����ʵ����١�
��3��ר�ŵĿɱ���������ʵ����,��ʵ������װ�пɱ�������������,ͬʱ�÷��������ģ�ⱻ�ض���,����ִ�к�ͨ����������ܵ���������۲�ʵ������,�������Ʒ��������λ���Ľӿڵ�·,����ͨ����λ�������������ʵ���豸Ͷ������,����ʵ������ֱ��,��ʵ����ϴ�,����ѧУ�Ѿ�����ѡ�������豸[4]��
���ڴ�,���������Զ�ά�����ŷ�����ƽ̨Ϊ����������������S7-200����ģ���ƽ̨���ж��ο��������ƣ�ʹ��������õĹ켣�˶��������������������ʵ�鹦�ܵȡ�Ϊ����PLC����ʵ������ɿ�������ƽ̨��
1.5�ɱ������������ŷ�����Ŀ���
���ڲ�������������ŷ�������Ƶ�һ�֣�������в��ò����������ϵͳ�Զ�ά�ŷ�ƽ̨���п��ơ�
�����������ϵͳ,��һ��һλ����ϵͳ,��ν��һλ����,���ǿ��Ƶ綯���϶����ش�һ��λ�����е���һ��λ�á��Բ����������,���ǿ��Ƶ綯����һ������λ���������ɲ�������һ��λ�ý�������״̬������Ҫ��綯��ʵ�����еIJ���һ��Ҫ���趨���,�����������[5]��
1.5.1 PLC�ŷ��������ϵͳ�������
�ִ����˶����Ʒ�����Ҫ��ֱ���ŷ������������ŷ������������ŷ����������н����ŷ��������������,���۸�ϸߡ����Ų����ŷ��������Ƽ���Ѹ�ٷ�չ,�����ŷ�����ϸ�־����������,���˷�����,ʧ���IJ���,���Լ۱ȴ������ߡ����������ֱ���������źſ���,���跴���ɿ�������,���ۻ���λ���,���ƾ��ȸ�,��˱��㷺�������ֿ��ƺͼ�������ƵȾ��ܶ�λ�Ŀ���ϵͳ�С�
�ɱ���������PLC��һ�����ڹ�ҵ�ֳ����Ƶļ���ƽ̨��PLC�ۺ��˼�����������Զ����Ƽ�����ͨ�ż���,ʹ��������̡������û��ļ������,�û���ͨ���������,ʵ�ָ��ָ��ӵ������ơ�S7-200 PLC���нϺõ�ʵʱˢ�¹���,���Բ���һ��Ƶ�ʵ������ź�,���Ҿ��д��ʵľ��������ӿ�,�ܹ����㲽���������ĵ�ѹ�͵���Ҫ�����,��ϵͳ����S7-200ֱ�ӿ��Ʋ����綯��������ϵͳ,ʵ�ֶ���Ŀ���,��ϵͳ�Ľṹ��ͼ1-2��ʾ��
ͼ1-2 PLC���Ʋ������ϵͳʾ��ͼ
��λ�������Ľ�������λ���ź�ͨ��A/Dת��������PLC,PLC���ݸ�λ���ź���PID�������λ���ź���Ƚϼ������Ӧ�IJ������λ��,�����һ����Ӧ�������źŸ����η�����,���η�����������ĵ�һ���崮��������ʽ��ת��ֱ����������ӵ����������������Ĺ��ʷŴ�����������,�Ա��γ���ת�ų����ɴ��γɵĸ������źž�����Ĺ��ʷŴ���,�����㹻�ĵ��ת��ʹ�綯����ת�����IJ���PLC�ڲ�������ʵ������Ƶ�ʱ仯�Ĺ���,������Ӳ���ɱ�,�����൱��ʵ�ü�ֵ��
��������Ľ�λ������������ĸ���������;ת��������Ƶ�ʳ�����;ת����������䵽��������ĸ�������������йء��������PLC�ɲ���һ�����ڵĿ�������,ʹ��λ�Ĵ�����λ,������Ӧʱ��,ͨ�����η�����ʹ����̵�����ʱ���ͨ��������������ɼ����������������,ʹ���������һ���ٶ�,ת��һ���ĽǶȡ����ݹ���Ҫ��,�ۺϿ��Dz������������,ѡ�����ص�������ķ�Ӧʽ���ಽ�����,��������ת�����㹻������,��ѡ�����������Ҫ�������벽���������ʱ,�Ȱ������Ȧ��һ�˶��ӵ�+12V��,��һ�˰�һ����˳��ӵ�����������Ȧ����ˡ�
1.5.2����ϵͳ��ʵ��
���IJ���������S7-200ϵ��PLCΪ����,����S7-200PLC����·���������������,һ·�������������Q0.0�����������������,ͨ���ı�Q0.0��������Ƶ�������Ʋ��������ת��,��һ·��������������Q0.1����Q0.0���������Ƶ�� ,����������ṩ�ȶ���������ѹ,����������ʵ�ֲ��������Ƶ��ѹ������·�Ĺ���,�������Ŵ��·һ��,ʵ���˿��١��߾��Ȳ����������������Ҫר�ŵ���Ƶ��ѹ��·,������Ӳ����·�ĸ�����,�ṹ��,�ɱ��͡�
��1�����������������
�������������ԭ����ͼ1-3��ʾ��
ͼ1-3 �������������ԭ��ͼ
���������λ����ͨ����λ����EM235 A/Dģ��ת���ɿ�������ʶ���������,�볡ֵ���бȽ�,�������ֵ,�������ֵ���һλ���ڲ��ȶ�״̬,��Ӧ�Բ�ֵ������������,����ֵ������������ֵʱ,�Բ�ֵ���зŴ�,Ȼ��ֵ����һ���Ļ��㷽ʽ����ɲ������������Ƶ��,�Ӷ����Ʋ��������ת���ٶȡ�
�ڶ��� ��ά�˶��켣�������������Ľ��������
��������ϵͳ��Ϊ�������֣���PLC Ϊ������������ϵͳ����λ��MCGS���ϵͳ�����¼��Խ�����PLC���ƵĶ�ά�켣�˶�ƽ̨ϵͳ���Լ��������ԭ�����飬���������ϸ�ĸĽ�������
2.1��ά�켣�˶�ƽ̨��ϵͳ���
��������PLC���ƵĶ�ά�켣�˶�ƽ̨��������̵Ļ���,��ƽ̨�ɵ������Ʋ��֣���е�����Լ��������ֹ��ɡ�����ϵͳ�Ŀ��ƶ���Ϊ�����ŷ���������˶���X-Y��еƽ̨��ϵͳ�ĵ������ƺ��IJ���������S7-200 CPU224 PLC����������Ϊ�����֣�����һ����ΪPLC����ִ�еĿ��Ƴ�����һ��������λ�����˻��������棬��MCGS��̬������д���ɡ�Ϊ�˸��õ��˽��̣��б�Ҫ���˽�һ�¶�ά�켣�˶�ƽ̨��ϵͳ���±��Խ�������ϵͳ�빦�ܡ�
��1��ϵͳ��ɣ�
����ϵͳ������ͼ2-1����ά�켣�˶�ƽ̨��һ���ܻ���һ�廯��ѧ�豸��������PLC ������������䡢��ά��еƽ̨��S7-200 �������DZ���ϵͳ�ĺ��IJ��������������ŷ��˶����Ƽ�I/O ��Ĺ��̿��ƹ��ܡ����˶����ƹ����У��������Ϳ���ָ����ŷ������������������������ŷ�����˶�������������ά��еƽ̨�˶���PLC����������PPIͨ��Э�飬ͨ��RS485���нӿ����ӡ�������ȫ����Ƴɶ�����ģ�飬��������ͬ��ʵ��������顣
��ά��еƽ̨��һ�����ù���˿�ܴ�����ģ�黯ʮ�ֹ���̨������ʵ��Ŀ��켣�Ͷ�����Ϊ�˼�¼�˶��켣�Ͷ���Ч����ר���䱸�˱ʼܺͻ�ͼװ�á�ʵ��ϵͳ��������������Ŀ��ơ���������ϵ�Ŀ��ơ�����༭�����С����ش���༭�����С������˶��켣���ơ�ϵͳ�ļ����������Ƶ�ģ�飬���ھ����ʵ���������Ӧ������ģ�顣
������൱��һ��С�͵ĵ������ƹ����ŷ�����������ֵ�Ԫ�����߶����Ź��ɡ���ά��еƽ̨�������ź��߶����������Ľ��߶����ţ�PLC��I/O��Ҳ���������Ľ��߶��������ά��еƽ̨���������źŶ�Ӧ��
ͼ2-1 ϵͳ��ɿ�ͼ
��2��ϵͳ������
��PLC�������������ͨ�����巽������ŷ�����������������������ŷ�����������ŷ�����Դ�����������������ٶ��Լ�λ����Ϣ����������ͬʱ����ͨ��PLC�ĸ�����������ڷ�����PLC CPU���Ӷ�����һ�����ƻ�·��������ⲿ�����������뵽PLC CPU ������ƣ���λ��ͨ����̬����ʵ�ֶ�ϵͳ�Ŀ��Ƽ���[11]��
��3��ϵͳ���ܣ�
���Զ������ŷ����������Ч���ƣ�ʵ�����������岹���ܣ��������ֲ�ͬ���߹켣�˶���ͨ����űʻ����������������Ρ������Ρ����ҡ��������ߡ������ߵȡ��������Զ��幦�ܣ�ѧ�����Է����Լ����������ͼ�ι켣��
������ �ܽ���չ��
6.1�ܽ�
���Ź�ҵ�Զ����IJ��Ϸ�չ����У�Զ���רҵѧ����ʵ������Խ��Խ�ܵ����ӡ������Ƚ��걸�Ĺ�ҵ����ϵͳʵ���ң���ѧ���õ����Ϲ���ʵ�ʵĶ���������Ϊ�ձ鹲ʶ����У�Ķ�ά�켣�˶�ƽ̨��������˳Ӧ�������Զ����˲�������Ҫ��
�����ڵ�ʦ�ľ���ָ���£����豸���̻����Ͻ����������ʵ�֡����ĵ������Ƕ�ά�˶��켣�������������ĸĽ���ƣ��ڴ˹�������Ҫ��ƺ�ʵ����һ�ֻ���PLC�������幦�ܿ�����Բ���岹���ܵ�������ƣ�ʵ�ֹ켣�Ļ��ƣ���Բ�Σ�����ǣ������ߣ������Զ����ͼ�Ρ�����˿��������Ķ��ο������������õĹ켣�˶����������������������ʵ�鹦�ܡ�Ϊ����PLC����ʵ�������˿ɿ�������ƽ̨��
6.2չ��
��Ȼ������ƻ�������˼ȶ������������Ҫʹ����PLC���ƵĶ�ά�켣�˶�ƽ̨���õķ������ã����кܶ��Ҫ����
��1������PLC���ƵĶ�ά�켣�˶�ƽ̨���ֻ��ʵ��һ�������Ļ��ƣ��д��ڽ�һ����������DZ������ѧ�����뿪��PLC���Ƴ�����ѧ���Ĵ��²��ܣ���Ƴ�����Ȥ���ӵ�ͼ�Σ�����ѵ��ƽ̨���ں���
��2�����������ģ����ƣ�����ʱ��ԭ�����ļ������ֻ��ʵ�ֿ��ƶ�ά�ŷ�ƽ̨����ͼ�Σ����ڵ�����ģ�⻭��ͼ�Σ��д�������н�һ���ı��ʵ�ָù��ܡ�
Ŀ ¼
��һ�� ���� 1
1.1ѡ�ⱳ�� 1
1.2����� 2
1.3�ɱ����������ĸ��� 2
1.4�ɱ���������ʵ��ϵͳ��Ӧ����״ 2
1.5�ɱ������������ŷ�����Ŀ��� 3
1.5.1 PLC�ŷ��������ϵͳ������� 4
1.5.2����ϵͳ��ʵ�� 5
1.6�ɱ����������ı�� 6
1.6.1���õ�ָ�� 6
1.6.2�������ı�ʾ���� 7
1.6.3����ָ�� 7
1.6.4�岹���� 8
1.6.5Ѱַ��ʽ 10
1.7������������������ 13
�ڶ��� ��ά�˶��켣�������������Ľ�������� 14
2.1��ά�켣�˶�ƽ̨��ϵͳ��� 14
2.2ԭ����ļ�� 15
2.2.1 PLC�Ŀ��Ƴ���ԭ�� 15
2.2.2ԭ������ŷ�����Ŀ��� 16
2.2.3ֱ�߲岹���� 17
2.3 PLC���Ƴ���Ľ���Ʒ��� 21
2.3.1ԭPLC���Ƴ����д��ڵĽṹ��������Ӧ�ĸĽ����� 21
2.3.2ԭPLC���Ƴ����д��ڵ�ϸ����������Ӧ�ĸĽ����� 25
2.3��ά�켣�˶�ƽ̨���������MCGS���ĸĽ���Ʒ��� 27
2.4������ 28
������ ��ά�켣�˶�ƽ̨���Ƴ���Ľ���� 29
3.1��ز������趨��ת�� 29
3.1.1ϸ������ʵ����������ת�� 29
3.1.2���������ʵ�����������ת�� 30
3.1.3�м���������Ӽ��趨 30
3.1.4��������ĵ�ַ������� 31
3.2�켣���������洢�ĸĽ���� 31
3.2.1���ù켣�ӳ��� 31
3.2.2�켣����ֵ�ļ��㣨��ԲΪ���� 32
3.2.3�켣����ֵ�Ĵ�� 35
3.3��ͼ��켣����ֵ���͵ĸĽ���� 36
3.3.1���켣ʱ�ij�ʼ�����趨 36
3.3.2 line�ӳ���ĵ��������ָ�� 37
3.3.3������һ������ļ��㼰�������� 37
3.3.4����������̧��ָ�� 38
3.4�Ľ����³���Ĺ��� 38
3.4.1ͬһ�켣ϸ�����ı任 38
3.4.2���Ӻ����ı������ƣ�����Ҷ�ݳ���Ϊ���� 39
3.5������ 41
������ ����MCGS��������ĸĽ���� 42
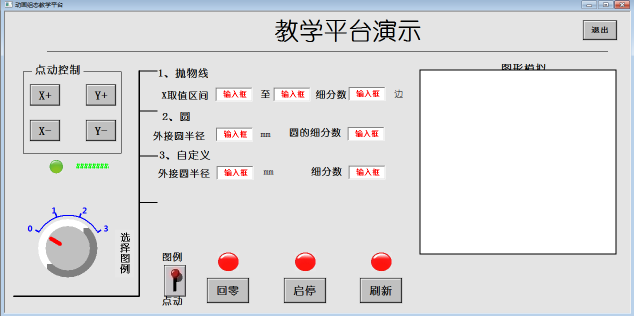
4.1����MCGS ����������� 42
4.1.1����������� 42
4.1.2����������� 42
4.2����MCGS�����ĸĽ���� 43
4.2.1�豸���ڵ���� 43
4.2.2�û����ڵ���� 45
4.2.3ʵʱ���ݿ����� 46
4.2.4���Դ��ڵ���� 47
4.3������ 48
������ �������ð�ȫ�Է��� 49
5.1��ά�켣�˶�ƽ̨�ľ����Է��� 49
5.2��ά�켣�˶�ƽ̨�İ�ȫ�Է��� 50
������ �ܽ���չ�� 51
6.1�ܽ� 51
6.2չ�� 51
��Ҫ�ο����� 52
�� л 53
�� �� 54
��¼���ο����� 55