
��ICP��112451047180��-6
ժҪ:��ƪ���������ǵõ�һ��������ģ�͵�ģ�������AUV����ͼ��ѧ��ֵϵ�������������ۺ�ʵ֤������ͨ����ȡ���Ƶ�ˮ����֪���������ͨ���滻��������ִ�����ӿ�ʹ������ģ����MVS,ģ����Ƕ����ѭ���Ŀ��������С�
������——ˮ������������ģ������
һ ����
��(AUV)��Ʋ�������ˮ��ϵͳ�ͼ���ʵ����(USTL)���ڲ���ͼ��ѧ��һ��С��������״�ij����Ż���һ���ͳɱ��Ļ�е�ṹ����һ��ģ�ͱ���ΪLAUV�����������������µĿ��ƺ�����������������ע�����Թ��϶Ի��ҵ�Ӱ�졣

���ڴ��������,��ƺ��Ż��Ŀ�������Ҫһ��ϵͳģ�͡��ڱ������Ǽ���ˮ�»����˵ķ�����ģ�͵���ֵϵ�����������������ۺ;��鹫ʽ��Ϊ��ͨ���������ģ�ʹ��Ѿ������˵����Ƴ���,��L AUV,REMUS����������ﴴ�����������о����Ͷ��Ƶ�USTL��ͼ��ʾ������������ģ��Ϊ����ִ�и���Ȥ��ˮ�в��ԵĿ�����,�������ں㶨���,Զ����档
������һ��������ϵͳ�ij��÷�ʽ��������������ε�����MVSע���ģ�͡�������USTLʹ�õ�MVS����ϵͳ��һ������������������������ŵĶ�̬������һ��ģ����嶯������Դ����һ�������ܿ⣬����������ڽ���ʽ��ʵʱ�ķ��棬�������ʺ���ģ���ƶ����������������ʵ�����˶���������һ������ѧģ��ĸ����һ����ѡ����ײ���������ɡ�������ʹ��������ײ��û����ײ����,��ø��õ����ܡ�ODE�ķ�չʼ��2001��,���Dz�����ǿ�������������û�, ���Ѿ���Ӧ��������Ӧ�ó���(�μ�[1],����)����Ϸ��Ȼ��,���Dz�֪���κ��й�DZͧ���淽������������Ʒ��
���������������MVS�����ij���������������,MVS��������������������ƶ����Ľӿ�.���ַ�����Ŀ����������δ�ĵ���ʵ������ģ���������ʵ��������һ�Ŀ��ƹ��ܡ����������漰��ͬ�Ŀ��ƹ��ɻ����Է������ڴ���������,����ϵͳ���븴�Ƶ�һ����ͬ���Ե�һ��ģ�������ʹ������ȷ���,����ʵ�������Ը��µ�����������Դ����ϵͳ����һ�£����ǰѶ����Ĵ���ԭ�ͻ�����Ϊ���İ汾,�������ǵķ���Ҫ����������Ƶ������������ȶ���
������֯����,�ڵڶ��������ǻع���ͨ������ˮ�µķ�����ģ�ͽṹ��һЩΪ�ض����õ�������״�ij������ڵ����������ǵõ�ʵ�ʵ�LAUVģ��ϵ��ֵ������������̬������������ģ�͵�ijЩ�������ڵ��Ľ���������ʵ��ģ���������,�ڵ��岿������������ۡ�
�� ������ģ��
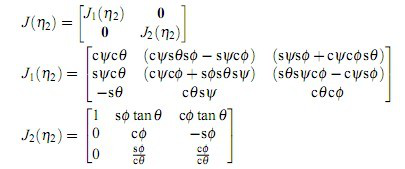
����ˮ�º�����(AUV)�ǶԷ�����ϵͳ��õ����� (��[2]����)��Ϊ�˶���ģ�ͣ�������Ϊ�������̶�������̶��ͽӵع̶������������촬ʦ���ֻ�����ʦѧ�ᣨSNAME��[3]�� ������Ĺ̶������������6�����ٶȷ������鰸����������6�����ٶȷ���s ν = [νT1,νT2]T =[u,v,w, p,q,r]T������Ժ㶨���ٶ�����ϵ�뺣�����ֱ�����ҡ�ڣ��������࣬������ƫ�����ڵ���̶������������ɲ��ֵ�������̬�ȣ�η =[ηT1,ηT2]T = [x,y,z,φ,θ,ψ]T. ����̶��ο�֡���Ա���Ϊ��AUV���ԡ����������ο�֡���ٶ�Ҫͨ��ŷ���DZ任��
�˶�������һ������ı�����ĸ����˶���ɡ���ˮ���������ص����ͨ�����н�ģ�����嶯��ѧ�����ǿ���������Ҫ���ã��ָ��������һ�֣���ȡ����ֻ�ڳ����ϵ��������������������������ĵ����λ�õģ����ӵ�������������������ѹ���յ���/������г�˶������ᣬ����ɵ�Ƥ��Ħ�����������������������䣬һ����������Ԫ�ؽ��ж��壬�Ա�������ԺͶ��β�����ˮ����������������Ǻ���ȷ������������ͨ����ͨ����������嶯��ѧ���飬������Ԥ�ƣ���һ�ַ�����ͨ����ȷ������ʽ�Ĺ�ʽ��

�ڹ̶���ܵķ������˶����̣����У�M�dz����ĺ㶨�Ĺ��Ժ��ӵ���������ν����C��D��ν���ǿ������������������������L��ν����������������Щ���߰�����Щ������������g��η2��������Ļ�ԭ�������أ�τ�����������ƶ�������Ĺ̶�������������������������ĸ��������������븡���������غϣ��ǣ�η2���ǿյġ����⣬����AUV�˿�/���ϣ�����/�ײ���ǰ/��Գ��ԣ�M��D��ν���ǶԽǡ������ǵ�ˮ�»����˲�����ȫ�ƶ���������������������¶��ͳ�Ƭ�ں����������ƶ������ֻ�е������һ���Ķ�̬ģ�͡�τ�����������������������ٶ�N��0<N≤n���ˮƽ������б��ΔS��δsmax≤ΔS≤δsmax����“��ֱβ�����ΔR��δrmax≤ΔR≤δrmax������̬���ƽ����ĵ���ͳ�Ƭ�ŷ�ϵͳͨ�������ද��ѧ��ö࣬��ˣ��������Ŀ�ģ����ǿ��Դ�ģ�����ų�������Ҳ��Ϊ�������Ķ˿�/���ϵײ�/��������״���ǶԳƵģ�Ϊ��ȫ���������ͨ������һЩ�����ġ��������Ե������ĵĸ���������ΪǷ���������ĸ����Ͳ���ṩ�ָ����ء�
�� LAUV�ͺ�
���������ˮ�µij�����LAUV����Ҫһ���ͳɱ���DZͧ�������Ƶ�USTL����ѧ�ͻ����ĵ��顣����һ�������γ�������108���ף�ֱ��Ϊ15���棬��Լ18ǧ�ˡ��ƶ���ϵͳ����һ���ƽ�����3��4�����Ƴ�Ƭ��ȡ�����ڳ����ϵİ汾�����ɣ����ж��ǵ������ģ���װ��һ���ͼ����ϵͳ���еĿ���ϵͳ��������ʹ��IMU��Ԫ�����ڵ���ϵͳ����ȴ�������LBL��Ԥ������ٶ�Ϊ2m / s��
�������ǵĽ�ģ��������ɣ���һ��AUV�������Ļ����ϣ����ǽ���Щ�����һ��Ҫ�عˡ���AUV��һ��REMUS�ඨ�Ƶ�USTL�ij���������һ��������AUVԼ50ǧ�˳���������1.4�ij��ȡ�������AUV��ϵ����ֵ�Ǵ����ǵ��ֳ�ʵ��õ��ġ�����������ù�ʽ����Ϊһ����Բ���壬��[2]�����������ֳ�������״���ǿ��Խ��ƽ��ܵģ���Щֵ������������[4]���Ƶ�AUV�����˷��������ڶ��κ�������ϵ��������ʹ����[4]�еó���ֵ�����������죬�������Ե�����ϵ��������ʹ�����ǵ����飬��ʹ����[2]���������ij����������ԵĽ������ע�⣬�����ڳ����ĶԳ��ԣ�һЩϵ�������ڴ�ֱƽ���ϵ��˶���Ӱ������ˮƽƽ���ϵ��˶���Ӱ����һ���ġ����ڹ��Ժ��ӵ����������LAUV���������ʽ�ٶ�����ǰ������ͬ�ķ�ʽ���룬�����������£���AUV�������κ���ʽ��ֱ���ƶ��Ĺ�����̬����ˣ������ȶ���һ�������ķ�ʽ���У�ͨ��������������ĵĸ��������ģ��Խ���һ���ָ����ء��̶��ο��Ǹ��������ģ������ĵ���Դ�ľ�����0.01�ף�Ϊ�˼���������Ǽٶ��������ֲ�������һ������
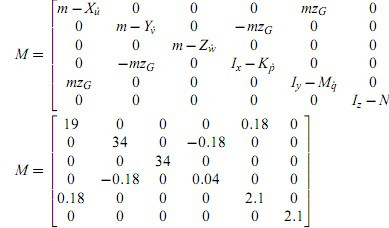
�ڳ����Ĺ���������������Ƭ��ʹ�������ǶԳƣ�������ˣ������ĶԳ��������ǿ��������µļ�: Yv|v| = Zw|w|, Nv|v| = −Mw|w|��Yr|r| = −Zq|q|, Nr|r| = Mq|q|��ͬ���Ĺ�ϵ�����ڷ����������:Yv = Zw, Nv = −Mw, Yr = −Zq,Nr = Mq. ����ϵ����ʵ��ֵ�����ǽ�ʹ��ͳһ��ˮ����������������������ʽ�����ƣ����ĵ����ٶ�ΪU0��≃1.5m / s�ġ���ˣ�����������
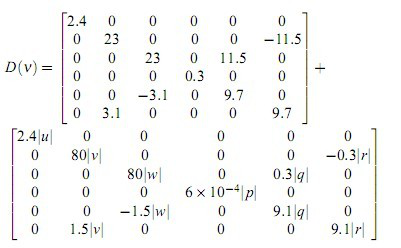
������ֵ����ע�⣬���ڵͷ��٣������egYv| V| | V|��������Ϊ�Ǻ��Բ��ơ�������Ϊ�����ڳ�Ƭ���棬Ҳ���ڵ������������������ء����ڱ���������������������磬[5]��
��������������ϵ����Yuvb= Zuwb������ֵNuvb=-Muwb��ʹ������Ĺ�ʽ������CLB= 1.24��һ������ϵ��������������ij��Ⱥ�ֱ�����õ���0.65L��һ��ѹ�����ĵľ��鹫ʽ��
LAUV���������汾��һ���ij�β���������ᣩ����������ǵ�һ��������Ƭβ��һ����ֱ�����������ڴ�ֱ������±120�ȣ�����һ���汾���ֽ����¼���������������صĹ�ʽ����Sfin=64ƽ�����׳�Ƭ���沿����xfin=-40���ij�Ƭ��������ĵĸ�����CLF= 3������ȡ���ڳ�Ƭ�ļ��η��棩�������������صļ��㹫ʽ�����Ƶģ���ˣ���������
�����������裬���Ƕ������C��ν������������������������������������Ӱ�죩�ƶ���ϵͳ�Ƿ������·�ʽ�����Ǽ��裬����������һ���㶨��������Xprop�ģ�Ϊ�˱���������ȶ�״̬������IJ������أ�������������ʽ����-0.06Xprop��ʹ�÷���5��6����ij�Ƭ�������أ���ϵ����ֵ��Yuuδr = −Zuuδs = 9.6 and Nuuδr =Muuδs = −3.84.
A.��������
һЩģ�Ϳ����������ҵ�������[6][7][8][9]�������Ƿ�������������ȵȡ���������Ҫ�����ڲ�Ƥ��Ħ��[2]�����ڿ����������ڻ����ϵͳ����з�����Ҫ���ã����ھֲ����ȶ��Է������ͷ��ٵ�����£��������ʱ�������룬���������÷dz�С��������Է��������ᣬ���Ի�ϵͳģ�͵�ƽ��㸽�����ܻ���ʾ��������Ҫϵͳ�����������������һ��ͨ�����������������������ٶȷ�����ʽ����ʵ���У��⽫����һ����Ƶı��أ���������ĺ���������ϵͳ���ȶ�����ʵ�ϣ����ǿ������������ҵ����ӣ����߷���һ���������������������[10]��[11]���������ǵ��ֳ����������������ִ����ȵ��ڣ�����ʹ�õļ�����Ӧ������������һ��������ϵĿ��������Է��������������ģ�͵ķ���ָ������������Ϊ��ǿ��ʹ�ã�Ŀǰ������£�״̬�����ķ�������
�ͳɱ���������ƣ���������С�ĺ�����˵�һ�״���������ˣ�����û��ֱ�ӵ��ٶȲ��������һЩ�������������ԵIJ������������������������ٶȹ��Ƴ�Ϊ���⡣��չʾ��һ����ȷ�����������������Ҫ�ԡ�
����Routh-Hurwitz�������Ի�ϵͳ����������ʽ��Lyapunov���Ի�������LLM����LLM�ǻ���һ�¶��������������磬[12]����
•������ϸ��ȶ�������ϵͳ����ô��ƽ����ǽ����ȶ���ʵ�ʷ�����ϵͳ��
•����Dz��ȶ������Ի�ϵͳ����ô��ƽ����Dz��ȶ��ģ�������ϵͳ�ģ���
•�������ϵͳ�ٽ��ȶ�����ô�������ܽ�Ϊ��������
���ǿ�����������ģ�͵�ˮ�»����˵ĸ����˶���ͨ��������������ʽ����7��ʹ�ø��Ե���ֵϵ������ʵ�ϣ��ӿ����ķ�����������֤�����Ĵ��ڣ��ٶ�С��û���㹻������ʹϵͳ�ȶ���
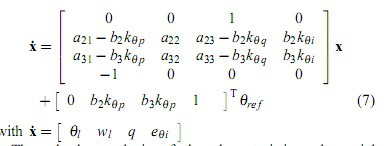
ע��,ͨ�������ƽ���( x�B = 0) since q�B = q,�����ǿ��Եó����ۣ���ֵ���κ�ƽ���qΪ�㡣��������ֵ������������������̵�ϵͳ��
��Щ���̵Ľ��ȷģ�����Ի��Ǻ����õ�,����Ҳ��������ִ�����õ���̬����������,�������,���Dz�ȷ���������ڵ�ȷ��λ��,��Ϊ��ͬ��Ӳ�����Ž��ܵ���⣬��������������ΪzG = 1���ף�����ʾ����ֵ̬��״̬����,�������Ի�ϵͳ�ļ���,���ڲ�ͬ��ֵ�ļٶ�ֵ���ǡ�������Ǽ������Ľ���zG = 3����,��������ΪҲ������ͬ,�����������Ԥ�ڵ�����,��Ϊ�Է��ָ������DZ��,��Ҫ���ߵ�����ֵ�Դﵽһ���������ǣ�Ȼ��,������������ֵ������������һ���õĹ���ֵ��
�� ģ��
����һ����,��������LAUVģ����(MVS)�Լ�LAUV MVS����������Ҫ˵����,���ڸ�������ϵ�ṹ,��������ִ���ڲ�ͬ���͵ļ�����Ͳ���ϵͳ,��������Щ�������������������������˵��,MVS����ODE��ODE��������·��̡�
ODE����������ͬ���͵���ֵ����ߣ�Ȼ��,������εķ�չ,������Ա�Ƽ��̶���������������,���ɵ��˶�������һ���㷨(ŷ��)�Ҳ���Ϊ0.01�롣�������ģ������ѡ��ʹ���κ���ײ���,��Ϊ����һ�����泵�����������������ģ������,������ÿ��ʱ�䲽�ļ���Ҫ��
���ڷ�������У��������Ľṹ���Ըı䣬�����ij�ʼ״̬�����,Ȼ�����ѭ��ֱ����ֹ,��ִ�����²���:1)���ò��ӳ���(��������);b)��ȡģ�ⲽ��;c)��ͼd������λ�á�������ٶȡ�
��ˮ�»����˵Ľ�ģ�����嶯����������ÿһ�������ṩ��ͼ�����Ϊ��ЩӰ���Dz�������ODE����ģ�����,����Ҳ����Ӧ�á�
�����ַ�ʽ,������õ������ָ��(Ĭ��Ϊ����)��ODE�������Ե�ʱ�̡�����,���������,������Ϊֻ�ṩ������������������ġ���ͬ�������ڻָ�������
Ȼ��,�����������,�����������,������ʱ����ṩ��Ҫ������������Ϊԭ��Ĺ̶��ο���Ϊ��ģ����������ϵͳ,LAUV��Ƕ����ˮ�»����˵Ŀ���������ģ�����������,����ģ���������������,������˴��������ƶ��������������ǵ�����ʵ��ģ������LAUV�ij����������������Ŀ��,���Ƕ�������ϵ�ṹ��һ����̵�������
DUNE�ﵽ��ɢ��ϵ����֮��ķ�����ص���������ɹ����ļ�(��������DUNE������)��ͨ���������кʹ���ִ�е�������DUNE���档���������ʱ��������ֹ����DUNE��ִ���ڼ䡣������ͨ�ź�ͬ����ʹ������/�ȴ���Ϣ���߲�ͨ����Ϣ�Ľ���ʵ�ֵġ��ڲ���Ϣ��ʽͨ����������Ҳ������־��¼�����ⲿ����ģ�鹵ͨ��
���,LAUVģ����ʵ���˰�װ��һ��DUNE�ķ������Ե�MVS����������Ϊ�˱���ʵʱͬ���ͷ������Ϊ���ȶ��Ϳ�Ԥ����,��Ϊ����ʹ��һ��ʱ���ۼ���������ۼ�ʱ������Ч�������������������ķ���������ͬ�ġ�LAUV�ĵļ���ϵͳ����һ��400 mhz��Ӣ�ض�XScale PXA255����������װ��һ��ר�õ��Ϸ����Ż�(��������),�����ģ��ӿڣ������Ĵ�������ִ�����ϡ������з������,����ʹ��CPU11%�Ĵ����������������ǰ��ģ�Ϳ���ģ���ʵʱ����ʹ������º͵�CPU������ٶ�
�� ����
������ģ��ģ����ʾ�Ľ��,�Ƶ�������Ԥ����Ϊ�ij�����Ȼ��,���ڲ�ȷ���Ե�һЩϵ����������Щ������Ӱ�죬��ģ���ں̵ܶ�ʱ����ֻ����֤ˮ�²��Եص㡣��һ����,�����ģ��ϵ������ͨ������ȷ���ơ����,���ǿ�Ӳ�����ģ�����о�������ijЩģ��ϵ������������Ϊ��
����
[1]��Ъ��,“רҵ���ƶ������˷���”,�����Ƚ��Ļ�����ϵͳ��־��,��һ,û�С�
[2] ָ���Ϳ��ƺ���ij�����Լ��•�������ӹ�˾��1994��
[3]����˹,���¡�,�촬��ԭ���촬����ѧ��,1989,2������
[4]“��֤һ�����ȵķ���ģ���������”,˶ʿ����,���µļ���/Ӧ��,�������������Ȼ��������о����ĺ���,���źͻ�е����,2001��
[5]”��չһ�����ȵ�����ͬʱ���ģ��ˮ������������”,�ں���,2001��MTS / IEEE�����չ����,��һ,2001��11��5 - 8,450 - 455��1ҳ��
[6]���ɵº͵�̵�,“����ģ�͵ķ���������թ����ˮ�»����,“IEEE��־�ؿ�����ʦ���κ����������,��26��,û�С�4,ҳ633 - 645,2001��10�¡�
[7]��,���ͺͷ���IJ��εij���,“�ڼ������������ϵͳ���,1996��,����������1996��IEEE�������ֻ�,1996��9��15,62 - 67ҳ��
[8]����,.����ѧ”DZͧ����ģ����,“��Proc���Ĵ����ǡ������˺��Զ���,����˹��,2003��12�¡�
[9]���ɵ�,“�ȶ��ȶ����˶�һ��ˮ�¼����ܼ����ԽӴ���ѧ��”,������1996��IEEE��������Ϳ���,1996��12��,ҳ961 - 966��
[10]���ɵ�,��ɣ����,“������˹�ڶ�����ʱ����������:Ӧ�ó��������ƻ�еϵͳ,�������Ϳ���ϵͳ,û�С�73 - 88ҳ,2003��
[11]��,Ӧ�÷����Կ��ơ�����˹·����������,1991�ꡣ
12]������,����˹,������˹,ƽ��,����˹������÷��,����,��ϯ����,“����:һ�����α��漼��������������ս”,�ں���2007����(����)�����������ո���,2007��6�¡�