
苏ICP备112451047180号-6
1.毕业设计(论文)综述
1.1题目背景及目的
近年来,由于生活水平的提高,汽车也逐渐走进寻常百姓家。汽车数量的大幅度增加,虽然给人们的生活带来了便利,但是伴随出现的是交通拥堵,交通事故频发,交通环境恶化等问题。在这种背景下,基于几何特征的车辆类型识别技术研究就显得尤为重要。利用现有的交通资源设施,运用各种先进科学技术手段解决交通问题得到了充分发展。目前,智能交通系统(Intelligent Transportation System,简称ITS)得到了越来越广泛的应用,并在欧美等发达国家得到广泛应用,但在我国尚处于探索研究的起步阶段。车辆的类型识别是ITS的重要组成部分,本课题旨在分析各种车辆类型识别的基础上,综合图像处理和模式识别技术来实现车辆的分类。
1.2研究意义
模式识别(Pattern Recognition)在20世纪20年代后期被提出,是指机器识别、计算机识别,目的在于利用计算机对物理对象进行分类,使识别的结果尽量与客观物体相符合[1]。在模式识别学科中,通过对某一具体事物的观测,得到具有时间和空间分布的信息就称为模式[2],模式是某个事物的具体体现,模式类则是一类事物的代表。图像识别是近 20 年发展起来的一门模式识别技术,是通过运用现代信息处理技术和计算机技术来完成人对图像的认知和理解过程[2]。它以研究根据提取图像的特征进行识别和分类为主要内容,广泛应用于文字识别、指纹识别、遥感、医学诊断、工业产品检测、卫星航空图片解释等领域。车辆类型识别技术是现代智能交通系统研究的重要组成部分,因为其智能型和高效性,在车流量检测系统,高速公路收费系统,交通监测系统和停车场收费系统具备广阔的应用前景。
1.3国内外相关研究情况
车辆类型识别技术广泛应用于智能交通,我国真正将智能交通系统付诸实施是在1999年11月,由国家科技部正式批准建立了国家智能交通系统工程技术研究中心。经过多年发展,我国交通控制系统逐步完善已经形成了基于不停车收费(ETC)的公路交通信息化平台,但车辆类型识别的应用明显滞后于交通控制系统的发展,限制了交通系统进一步智能化。目前,国内的车辆类型识别技术主要应用于高速公路车辆不停车收费系统,停车场和机场车辆进出管理系统中。在现有的车辆类型识别技术中,国内外主要采用的方法有:感应线圈法、红外探测法、超声波检测法。虽然这些方法都能够做到车型识别,但是安装和维护较为麻烦,有的甚至要破坏路面。随着近年来计算机视觉技术和模式识别技术的发展,基于图像处理的车辆类型识别技术相应而生,通过车辆类型识别系统采集到车辆原始图像,对图像进行处理获取车辆信息达到车辆分类的目的。
国外此项技术的发展,目前形成了以美国,日本,西欧为中心的智能交通研究基地,其他国家也正处于发展阶段,美国是当前世界在开发领域发展最快的国家,其智能交通的研究可以追溯到1950年,当时是美国的一些私人公司对汽车的自动控制系统进行研究,美国的交通部门在60年代后才开始,当时称为电子线路导航系统,由于当时美国的交通发展主要以建设全国洲际高速公路系统为主,以至于这一段时间,美国的智能交通系统发展缓慢,同一时间,其他国家如欧洲,日本等国家投入了大量的人力物力并得到了快速发展。80年代后,美国交通发展开始逐步重视智能交通的发展,并凭借着先进的科技实力,逐步在此领域处于领先水平。1986年,对智能车辆公路系统(Intelligent Vehicle Highway System,简称IVHS)在美国的应用前景进行评估,并进行研究;1994年IVHS改名为ITS,其宗旨是协调加速美国先进技术的发展,出版了智能运输系统结构发展计划的报告,1995年美国交通部公布国家ITS系统项目规划,即“国家智能运输项目规划”,1997年,美国自动公路系统在圣地亚哥首次展示,并大获成功。1998年美国国会通过了《21世纪交通平等法案》,并在6年中由政府出资用于研究和开发,到现在,美国的智能交通技术已经广泛应用于各个部门,在全国ITS系统结构,全国ITS标准,ITS系统整合和公共汽车信号优先以及商务运行车辆管理方面取得了成功。
我国的智能交通研究起步较晚,但处于蓬勃上升的阶段,主要体现在以下三个方面:
(1)规划和政策方面。我国已经成立国家层面的相关机构来进行智能交通规划的研究,交通部门把ITS列入重点计划,进行深入研究。1998年,我国交通部正式成立TC204中国委员会,TC204委员会全称为交通信息和控制系统委员会,主要任务是架构中国ITS整体结构,规划智能运输系统未来发展的战略与方向等。
(2)技术方面。我国在70年代中80年代初,主要实验研究城市交通信号控制,之后90年代初,在一些大城市如北京、上海引进国外技术,城市信号控制系统投入使用,与此同时,开始逐渐建设交通监控系统和高速公路的电子收费系统。
(3)投资方面。“十五”期间,ITS的投入逐渐加大,并且国内一些企业的参与度也很高,为智能交通的发展创造了有利条件,“十二五”期间,投资力度加大,继续大力发展智能交通系统。
虽然我国智能交通起步较晚,但近几十年来,通过自主创新和技术引进,一些先进的技术在我国大部分城市的交通部门得到应用。虽然整体规模和层次上与世界发达国家还有不少差距,但部分领域技术水平已经处于领先位置。
2.本课题研究的主要内容和采用的研究方案、研究方法或措施
2.1研究的主要内容
根据所学知识,(1) 理解矩特征的概念,把矩特征用于图像识别的原理分析,(2) 梳理清楚不变矩的种类及优缺点,(3)不变矩特征用于图像目标的检测,(4)不变矩特征用于运动目标的检测,(5)编制算法程序,进行实验结果分析。
2.2研究方案
2.2.1设计思路
(1)采集车辆图像信息。
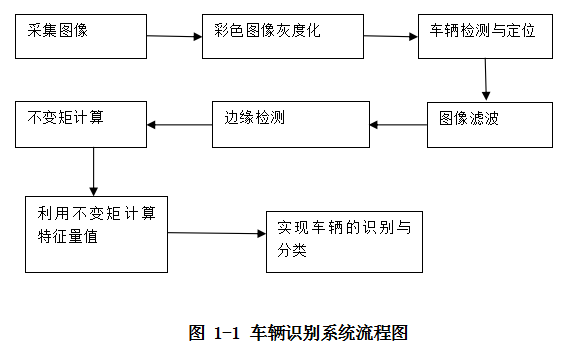
采集车辆信息,先采集几组背景信息,再采集背景下的车辆信息,最后采集车辆驶出背景的信息,分别采集不同车型的图像信息,对采集到的视频图像进行彩色图像灰度化、车辆区域检测与定位、去除噪声、边缘检测以及确定车辆图像的几何矩。由数码摄像机采集一组含有车辆信息的视频交通图像,将彩色图像转化为灰度图像,减少维数信息,以便对车辆区域进行检测和定位。由于噪声的干扰,对车辆识别可能造成影响,所以对图像去噪是相当重要的一部分。去噪后对车辆进行边缘检测,这样可以减少对车辆信息量的处理。
(2)提取车辆图像的特征。
车辆特征提取是车辆识别技术中最重要的一个步骤。数字图像分析是图像处理的高级阶段,它研究的是使用机器分析和识别周围物体的视觉图像,从而可得出结论性的判断。寻找出算法,分析图像的特征。然后将其特征用数学的办法表示出来并教会计算机也能懂得这些特征。这样,计算机也就具有了认识或者识别图像的本领了,称之为图像模式识别,也叫图像识别在图像中存在着一些特殊的信息,这些信息使该图像有别于其它图像。这些特殊信息就是图像的特征。按区域划分,特征有点特征、局部特征、整体特征;而根据特征的表示可分为幅度特征、直方图特征、变换系数特征、点线特征、边缘特征等。特征信息可以用图像、文字或数字表示,要求特征信息的信息量丰富而所占存储单元尽可能少。特征提取是模式识别的重要组成部分,特征提取的有效性关系到学习算法的选择与学习效率,甚至关系到分类是否可行,以及分类识别系统是否有效等问题。从一定意义上讲,它关系到一个模式识别系统是否有效[3]。为了提高识别率和节省资源,且不受目标获取条件和环境的影响,应提取并选择目标本原的重要特征。
在图像识别中,常被选的特征有[4]:
(l 图像幅度特征:图像象素灰度值、RGB、HSI 和频谱值等表示的幅值特征
是图像的最基本特征。
(2 直观性特征:图像的边沿,轮廓、纹理和区域等。这些都属于图像灰度的
直观特征。它们的物理意义明确,提取比较容易,可以针对具体问题设计相应的提取算法。
(3 图像统计特征:主要有直方图特征、统计性特征(如均值、方差、能量、
熵等)、描述像素相关性的统计特征(如自相关系数、协方差等)。
(4 几何特征:主要有面积、周长、分散度、伸长度、曲线的斜率和曲率、凸凹性、拓扑特性等。
(3)编写程序,利用图像的几何矩来进行图像识别的分析[5]
不变矩算法[6]就是一种通过提取具有平移、旋转和比例不变性的数学特征,从而进行图像识别的方法。它是一种以图像分布的各阶矩来描述灰度统计特性的矩描述方法,M.K.Hu首先于1962年提出了连续函数矩的定义和关于矩的基本性质,证明了有关矩的平移、旋转以及比例不变性,给出了七个矩不变量的算法,并应用于字母二值化图像的自动特征识别[7]。在HU矩的基础上,R.Y.Hong给出了离散状态下各阶矩的计算方法[8]。此时,几何矩方法已经得到广泛应用,许多学者在矩理论方面做了大量研究,并提出了一些新的矩的定义和性质[9,10]
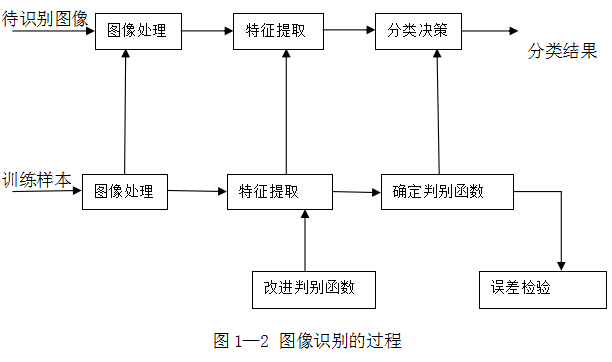
。在引入正交矩的概念后,人们提出了Zernike矩的基本定义和应用领域[11]。此后,几何矩被推广至径向矩[12],为导出径向和角度旋转不变量提供了条件。随着小波理论的发展,Shen等提出了基于小波变换的小波不变矩[13],从而实现了对全局和局部特征的同时分析。提取图像特征时,为使目标图像具有平移、旋转和比例不变性,可根据矩算法提取不变矩特征,[14]包括Hu矩、Zernike矩和小波矩。Hu矩和Zernike矩都是在整个图像空间中计算,得到的是图像全局特征,容易受到噪声干扰。尤其当可用样本的数量较少时,选择最能表示图像的特征就显得非常重要。基于小波变换的小波矩能同时得到图像的全局特征和局部特征,更适合识别相似形状或者有噪声干扰的目标图像。矩技术运用于图像分析中,不变矩算法通过提取具有平移、旋转和比例不变性的数学特征,从而进行图像识别[15]。一个典型的图像识别系统如图 1-2所示,由图像处理、特征提取、分类决策以及分类器设计四部分组成。一般分为上下两部分:上半部分完成未知类别模式的分类;下半部分属于分类器设计的训练过程,利用样本进行训练,确定分类器的具体参数,从而完成分类器的设计。而分类决策在识别过程中起作用,对待识别的样品进行分类决策。
(4)结果的记录与分析
借助Matlab软件神经网络工具箱分析处理结果,总结分析。
3.本课题研究的重点及难点,前期已开展工作
3.1本课题研究的重点
(1)课题研究的方案设计与选择;
(2)车辆特征信息的处理;
(3)车辆几何矩的计算与转换;
(4)软件编写与调试。
3.2本课题研究的难点
(1)课题研究的方案设计与选择;
(2)车辆图像信息处理;
(3)不变矩特征用于运动目标的检测;
(4)软件编写与调试。
3.3前期已开展工作
在导师的指导安排下,对图像处理知识的复习;及matlab软件的学习;并进行中外文资料的查阅;对本课题的研究方案进行设计论证。
4.完成本课题的工作方案及进度计划(按周次填写)
第1周:完成导师所提供参考资料的学习,并自主查阅相关资料;
第2周:进行文献综述,了解图像识别的理论基础,比较不同方法优缺点;
第3~4周:实现方案及论证,完成开题报告;
第5~7周:具体实施方案,编写目标检测和图像识别软件编制;
第8~10周:进行计算机模拟仿真实验,并检验算法的有效性;
第11~13周:研究不同图像和复杂背景对结果的影响,并研究改善措施;
第14~15周:实验数据数据处理,结果分析;
第16~17周:完成毕业设计论文的撰写;
第 18周: 进行论文答辩。
参考文献
[1]杨淑敏. 模式识别与智能计算[M]. 北京:电子工业出版社,2008.
[2]翟俊海,赵文秀,王熙照.图像特征提取研究[J].河北大学学报,2009,29(1):106-112.
[3] 孙即祥,王晓华,钟山等.模式识别中对的特征提取与计算机视觉不变量.北京:国防工业出版,2001
[4]陶词.基于统计特征的车辆识别算法的研究与实现.东北大学硕士学位论文.2005.12
[5]潘泓. 基于小波矩和小波神经网络的自动目标识别研究[D]. 南京:东南大学博士学
[6]韩军利. 红外图像目标识别技术研究[D]. 南京:南京理工大学硕士学位论文,2004.
[7]Hu M K. Visual Pattern Recognition by Moment In-variant [J].IRE Trans on Inf Theory,1962,8:179-187.
[8]潘泉,程咏梅,杜亚娟等. 离散不变矩算法及其在目标识别中的应用[J]. 电子与信息学报, 2001,23(1),30-34.
[9]Li Y. Reforming the Theory of Invariant Moments for Pattern Recognition [J].Pattern Recognition,1992,25(7):723.
[10]Teague M. Image Analysis by the General Theory of Moments [J]. J.Opt.Soc.Amer, 1980, 70(8): 920-930.
[11]王耀明.Zernike矩及它们的应用[J]. 上海电机学院学报, 2008,11(1),44-46.
[11]Wang Qi, Li Yan-jun; Jiang You-yi. A Method of Image Recognition with Rotation and Scale Invariability[J]. Infrared Technology,2006,28(10),559-566.
[12] 孙即祥,王晓华,钟山等.模式识别中对的特征提取与计算机视觉不变量.北京:国防工业出版,2001
[13]陶词.基于统计特征的车辆识别算法的研究与实现.东北大学硕士学位论文.2005.12
[14]Dinggang Shen, Horace H.S. Ip. Discriminative wavelet shape descriptors for recognition of 2-D patterns [J]. Image Computing Group, 1999,32(2): 151-165.位论文,2004.
[15]张葛祥,金炜东,胡来招. 满意特征选择及其应用[J]. 控制理论与应用,2006,23(1):19-24.